Search Results for author:
Found 32 papers, 6 papers with code
SPVLoc: Semantic Panoramic Viewport Matching for 6D Camera Localization in Unseen Environments
In this paper, we present SPVLoc, a global indoor localization method that accurately determines the six-dimensional (6D) camera pose of a query image and requires minimal scene-specific prior knowledge and no scene-specific training.
Gaussian Splatting Decoder for 3D-aware Generative Adversarial Networks
By training a decoder that maps implicit NeRF representations to explicit 3D Gaussian Splatting attributes, we can integrate the representational diversity and quality of 3D GANs into the ecosystem of 3D Gaussian Splatting for the first time.
Video-Driven Animation of Neural Head Avatars
We present a new approach for video-driven animation of high-quality neural 3D head models, addressing the challenge of person-independent animation from video input.
X-maps: Direct Depth Lookup for Event-based Structured Light Systems
We present a new approach to direct depth estimation for Spatial Augmented Reality (SAR) applications using event cameras.

Efficient and Accurate Hyperspectral Image Demosaicing with Neural Network Architectures
This results in long training periods of such deep networks and the size of the networks is huge.
Compact 3D Scene Representation via Self-Organizing Gaussian Grids
In this paper, we introduce a compact scene representation organizing the parameters of 3D Gaussian Splatting (3DGS) into a 2D grid with local homogeneity, ensuring a drastic reduction in storage requirements without compromising visual quality during rendering.
Multispectral Stereo-Image Fusion for 3D Hyperspectral Scene Reconstruction
To address these drawbacks, we present a novel approach combining two calibrated multispectral real-time capable snapshot cameras, covering different spectral ranges, into a stereo-system.

Towards Better Morphed Face Images without Ghosting Artifacts
Furthermore, we show that our approach does not impair the biometric quality, which is essential for high quality morphs.

Multi-view Inversion for 3D-aware Generative Adversarial Networks
Current 3D GAN inversion methods for human heads typically use only one single frontal image to reconstruct the whole 3D head model.
Multi-task Planar Reconstruction with Feature Warping Guidance
We introduce SOLOPlanes, a real-time planar reconstruction model based on a modified instance segmentation architecture which simultaneously predicts semantics for each plane instance, along with plane parameters and piece-wise plane instance masks.

Animating NeRFs from Texture Space: A Framework for Pose-Dependent Rendering of Human Performances
The extension to a controllable synthesis of dynamic human performances poses an exciting research question.
Animatable Virtual Humans: Learning pose-dependent human representations in UV space for interactive performance synthesis
We propose a novel representation of virtual humans for highly realistic real-time animation and rendering in 3D applications.

BTSeg: Barlow Twins Regularization for Domain Adaptation in Semantic Segmentation
We introduce BTSeg, an innovative, semi-supervised training approach enhancing semantic segmentation models in order to effectively handle a range of adverse conditions without requiring the creation of extensive new datasets.


Unsupervised Learning of Style-Aware Facial Animation from Real Acting Performances
This paper presents a novel approach for text/speech-driven animation of a photo-realistic head model based on blend-shape geometry, dynamic textures, and neural rendering.
Automatic Reconstruction of Semantic 3D Models from 2D Floor Plans
Digitalization of existing buildings and the creation of 3D BIM models for them has become crucial for many tasks.
Towards L-System Captioning for Tree Reconstruction
This work proposes a novel concept for tree and plant reconstruction by directly inferring a Lindenmayer-System (L-System) word representation from image data in an image captioning approach.

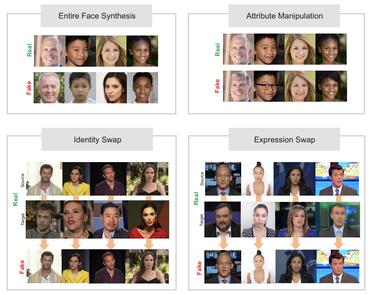
Fooling State-of-the-Art Deepfake Detection with High-Quality Deepfakes
Due to the rising threat of deepfakes to security and privacy, it is most important to develop robust and reliable detectors.

System for 3D Acquisition and 3D Reconstruction using Structured Light for Sewer Line Inspection
The assessment of sewer pipe systems is a highly important, but at the same time cumbersome and error-prone task.
Hyperspectral Demosaicing of Snapshot Camera Images Using Deep Learning
The dataset is a combination of real captured scenes with images from publicly available data adapted to the 4x4 mosaic pattern.
CASAPose: Class-Adaptive and Semantic-Aware Multi-Object Pose Estimation
Applications in the field of augmented reality or robotics often require joint localisation and 6D pose estimation of multiple objects.


Perfusion assessment via local remote photoplethysmography (rPPG)
From the extracted signals, we derive the signal-to-noise ratio, magnitude in the frequency domain, heart rate, perfusion index as well as correlation between specific rPPG signals in order to locally assess the perfusion of a specific region of human tissue.
Imposing Temporal Consistency on Deep Monocular Body Shape and Pose Estimation
In detail, we derive parameters of a sequence of body models, representing shape and motion of a person, including jaw poses, facial expressions, and finger poses.

From Explanations to Segmentation: Using Explainable AI for Image Segmentation
The new era of image segmentation leveraging the power of Deep Neural Nets (DNNs) comes with a price tag: to train a neural network for pixel-wise segmentation, a large amount of training samples has to be manually labeled on pixel-precision.
 Explainable Artificial Intelligence (XAI)
Image Segmentation
+3
Explainable Artificial Intelligence (XAI)
Image Segmentation
+3
Combining Local and Global Pose Estimation for Precise Tracking of Similar Objects
In this paper, we present a multi-object 6D detection and tracking pipeline for potentially similar and non-textured objects.
Automated Damage Inspection of Power Transmission Towers from UAV Images
Recently, the use of drones or helicopters for remote recording is increasing in the industry, sparing the technicians this perilous task.
Zero in on Shape: A Generic 2D-3D Instance Similarity Metric learned from Synthetic Data
We present a network architecture which compares RGB images and untextured 3D models by the similarity of the represented shape.
Focused LRP: Explainable AI for Face Morphing Attack Detection
This evaluation framework is based on removing detected artifacts and analyzing the influence of these changes on the decision of the DNN.
Neural Face Models for Example-Based Visual Speech Synthesis
We solve these problems by combining the realism and simplicity of example-based animations with the advantages of neural face models.

Going beyond Free Viewpoint: Creating Animatable Volumetric Video of Human Performances
Going beyond the application of free-viewpoint volumetric video, we allow re-animation and alteration of an actor's performance through (i) the enrichment of the captured data with semantics and animation properties and (ii) applying hybrid geometry- and video-based animation methods that allow a direct animation of the high-quality data itself instead of creating an animatable model that resembles the captured data.
Style Your Face Morph and Improve Your Face Morphing Attack Detector
A morphed face image is a synthetically created image that looks so similar to the faces of two subjects that both can use it for verification against a biometric verification system.
Reflection Analysis for Face Morphing Attack Detection
This map is compared with the highlights in the image that is suspected to be a fraud.
Accurate and Robust Neural Networks for Security Related Applications Exampled by Face Morphing Attacks
Artificial neural networks tend to learn only what they need for a task.
