Search Results for author:
Found 13 papers, 3 papers with code
An Empirical Study of the Generalization Ability of Lidar 3D Object Detectors to Unseen Domains
3D Object Detectors (3D-OD) are crucial for understanding the environment in many robotic tasks, especially autonomous driving.


A Semi-Paired Approach For Label-to-Image Translation
Data efficiency, or the ability to generalize from a few labeled data, remains a major challenge in deep learning.

Towards Pragmatic Semantic Image Synthesis for Urban Scenes
Second, in contrast to previous works which employ one discriminator that overfits the target domain semantic distribution, we employ a discriminator for the whole image and multiscale discriminators on the image patches.

Wavelet-based Unsupervised Label-to-Image Translation
Semantic Image Synthesis (SIS) is a subclass of image-to-image translation where a semantic layout is used to generate a photorealistic image.
![]() Ranked #11 on
Image-to-Image Translation
on ADE20K Labels-to-Photos
Ranked #11 on
Image-to-Image Translation
on ADE20K Labels-to-Photos
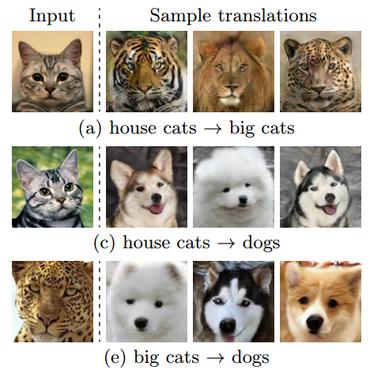 Multimodal Unsupervised Image-To-Image Translation
Multimodal Unsupervised Image-To-Image Translation
 Translation
+1
Translation
+1
Urban-StyleGAN: Learning to Generate and Manipulate Images of Urban Scenes
Moreover, we employ an unsupervised latent exploration algorithm in the $\mathcal{S}$-space of the generator and show that it is more efficient than the conventional $\mathcal{W}^{+}$-space in controlling the image content.
NIFF: Alleviating Forgetting in Generalized Few-Shot Object Detection via Neural Instance Feature Forging
Our contribution is three-fold: (1) we design a standalone lightweight generator with (2) class-wise heads (3) to generate and replay diverse instance-level base features to the RoI head while finetuning on the novel data.
Data-free Knowledge Distillation
 Few-Shot Object Detection
+2
Few-Shot Object Detection
+2
Towards Discriminative and Transferable One-Stage Few-Shot Object Detectors
We make the observation that the large gap in performance between two-stage and one-stage FSODs are mainly due to their weak discriminability, which is explained by a small post-fusion receptive field and a small number of foreground samples in the loss function.
 Ranked #13 on
Few-Shot Object Detection
on MS-COCO (10-shot)
Ranked #13 on
Few-Shot Object Detection
on MS-COCO (10-shot)
CFA: Constraint-based Finetuning Approach for Generalized Few-Shot Object Detection
In this work, we propose a constraint-based finetuning approach (CFA) to alleviate catastrophic forgetting, while achieving competitive results on the novel task without increasing the model capacity.
Ranked #8 on
Few-Shot Object Detection
on MS-COCO (10-shot)

Few-Shot Object Detection in Unseen Domains
First, we leverage a meta-training paradigm, where we learn the domain shift on the base classes, then transfer the domain knowledge to the novel classes.
An Unsupervised Domain Adaptive Approach for Multimodal 2D Object Detection in Adverse Weather Conditions
Integrating different representations from complementary sensing modalities is crucial for robust scene interpretation in autonomous driving.

HALS: A Height-Aware Lidar Super-Resolution Framework for Autonomous Driving
Lidar sensors are costly yet critical for understanding the 3D environment in autonomous driving.

USIS: Unsupervised Semantic Image Synthesis
Semantic Image Synthesis (SIS) is a subclass of image-to-image translation where a photorealistic image is synthesized from a segmentation mask.
SLPC: a VRNN-based approach for stochastic lidar prediction and completion in autonomous driving
Our algorithm is able to address the limitations of previous video prediction frameworks when dealing with sparse data by spatially inpainting the depth maps in the upcoming frames.
