Search Results for author:
Found 5 papers, 4 papers with code
GeNIe: Generative Hard Negative Images Through Diffusion
To achieve this, inspired by recent diffusion based image editing techniques, we limit the number of diffusion iterations to ensure the generated image retains low-level and background features from the source image while representing the target category, resulting in a hard negative sample for the source category.


SimReg: Regression as a Simple Yet Effective Tool for Self-supervised Knowledge Distillation
Feature regression is a simple way to distill large neural network models to smaller ones.
From Image Collections to Point Clouds with Self-supervised Shape and Pose Networks
We learn both 3D point cloud reconstruction and pose estimation networks in a self-supervised manner, making use of differentiable point cloud renderer to train with 2D supervision.
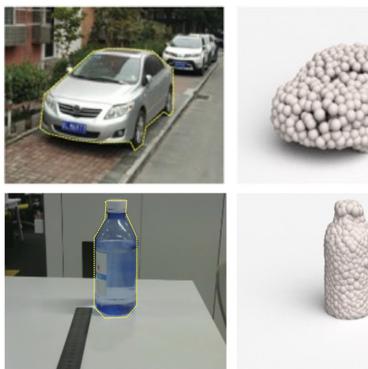 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Point Cloud Reconstruction
+2
3D Point Cloud Reconstruction
+2
3D-LMNet: Latent Embedding Matching for Accurate and Diverse 3D Point Cloud Reconstruction from a Single Image
3D reconstruction from single view images is an ill-posed problem.
Operator-in-the-Loop Deep Sequential Multi-camera Feature Fusion for Person Re-identification
Therefore, target identifications by operator in a subset of cameras cannot be utilized to improve ranking of the target in remaining set of network cameras.

