Search Results for author:
Found 2 papers, 0 papers with code
Safety Aware Autonomous Path Planning Using Model Predictive Reinforcement Learning for Inland Waterways
We demonstrate our approach on two scenarios and compare the resulting path with path planning using a Frenet frame and path planning based on a proximal policy optimization (PPO) agent.

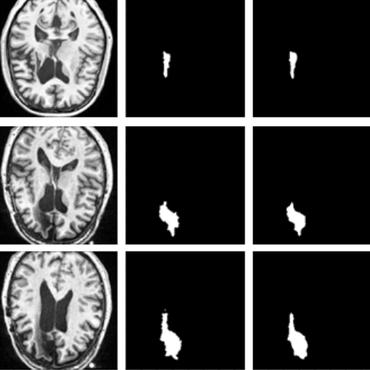
Improved inter-scanner MS lesion segmentation by adversarial training on longitudinal data
A discriminator model is then trained to predict if two lesion segmentations are based on scans acquired using the same scanner type or not, achieving a 78% accuracy in this task.
Cannot find the paper you are looking for? You can
Submit a new open access paper.
