Search Results for author:
Found 37 papers, 2 papers with code
Label-Enhanced Hierarchical Contextualized Representation for Sequential Metaphor Identification
At the sentence level, we leverage the metaphor information of words that except the target word in the sentence to strengthen the reasoning ability of our model via a novel label-enhanced contextualized representation.


A Survey of Optimization-based Task and Motion Planning: From Classical To Learning Approaches
Task and Motion Planning (TAMP) integrates high-level task planning and low-level motion planning to equip robots with the autonomy to effectively reason over long-horizon, dynamic tasks.

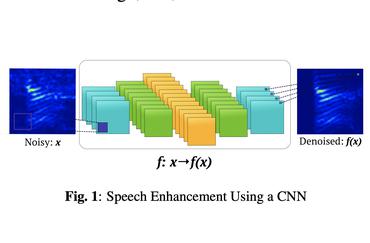
Unrestricted Global Phase Bias-Aware Single-channel Speech Enhancement with Conformer-based Metric GAN
With the rapid development of neural networks in recent years, the ability of various networks to enhance the magnitude spectrum of noisy speech in the single-channel speech enhancement domain has become exceptionally outstanding.
ORLA*: Mobile Manipulator-Based Object Rearrangement with Lazy A*
Effectively performing object rearrangement is an essential skill for mobile manipulators, e. g., setting up a dinner table or organizing a desk.
Seeing-Eye Quadruped Navigation with Force Responsive Locomotion Control
The controller ensures stable walking, and the force estimator enables the robot to respond to the external forces from the human.
Integrating Action Knowledge and LLMs for Task Planning and Situation Handling in Open Worlds
Each situation corresponds to a state instance wherein a robot is potentially unable to complete a task using a solution that normally works.
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
LLM+P takes in a natural language description of a planning problem, then returns a correct (or optimal) plan for solving that problem in natural language.
Learning Visualization Policies of Augmented Reality for Human-Robot Collaboration
In human-robot collaboration domains, augmented reality (AR) technologies have enabled people to visualize the state of robots.
Robot Task Planning and Situation Handling in Open Worlds
This paper introduces a novel algorithm (COWP) for open-world task planning and situation handling that dynamically augments the robot's action knowledge with task-oriented common sense.
Multi-Spatio-temporal Fusion Graph Recurrent Network for Traffic forecasting
The network proposes a data-driven weighted adjacency matrix generation method to compensate for real-time spatial dependencies not reflected by the predefined adjacency matrix.

RMFGP: Rotated Multi-fidelity Gaussian process with Dimension Reduction for High-dimensional Uncertainty Quantification
This paper proposes a new dimension reduction framework based on rotated multi-fidelity Gaussian process regression and a Bayesian active learning scheme when the available precise observations are insufficient.

MultiAuto-DeepONet: A Multi-resolution Autoencoder DeepONet for Nonlinear Dimension Reduction, Uncertainty Quantification and Operator Learning of Forward and Inverse Stochastic Problems
We propose a new multi-resolution autoencoder DeepONet model referred to as MultiAuto-DeepONet to deal with this difficulty with the aid of convolutional autoencoder.
PAGP: A physics-assisted Gaussian process framework with active learning for forward and inverse problems of partial differential equations
We introduce three different models: continuous time, discrete time and hybrid models.
STCGAT: A Spatio-temporal Causal Graph Attention Network for traffic flow prediction in Intelligent Transportation Systems
Existing methods are usually based on graph neural networks using predefined spatial adjacency graphs of traffic networks to model spatial dependencies, ignoring the dynamic correlation of relationships between road nodes.
An Operator-Theoretic Approach to Robust Event-Triggered Control of Network Systems with Frequency-Domain Uncertainties
In both cases, quantitative relationships among the parameters of the controllers, the Laplacian matrix of the network topology, and the robustness against aperiodic event triggering and frequency-domain uncertainties are unveiled.
Robust Event-Based Control: Bridge Time-Domain Triggering and Frequency-Domain Uncertainties
It is revealed that in static or dynamic event triggering mechanisms, the sampling errors are images of affine operators acting on the sampled outputs.
Reasoning with Scene Graphs for Robot Planning under Partial Observability
Robot planning in partially observable domains is difficult, because a robot needs to estimate the current state and plan actions at the same time.
DeepONet-Grid-UQ: A Trustworthy Deep Operator Framework for Predicting the Power Grid's Post-Fault Trajectories
This paper proposes a new data-driven method for the reliable prediction of power system post-fault trajectories.
Task and Situation Structures for Service Agent Planning
Everyday tasks are characterized by their varieties and variations, and frequently are not clearly specified to service agents.
Learning Quadruped Locomotion Policies using Logical Rules
Could one use a formal language to specify quadruped gaits?
Effective and Scalable Clustering on Massive Attributed Graphs
Given a graph G where each node is associated with a set of attributes, and a parameter k specifying the number of output clusters, k-attributed graph clustering (k-AGC) groups nodes in G into k disjoint clusters, such that nodes within the same cluster share similar topological and attribute characteristics, while those in different clusters are dissimilar.

A Survey of Knowledge-based Sequential Decision Making under Uncertainty
Reasoning with declarative knowledge (RDK) and sequential decision-making (SDM) are two key research areas in artificial intelligence.

Learning and Reasoning for Robot Dialog and Navigation Tasks
More interestingly, the robot was able to learn from navigation tasks to improve its dialog strategies.
Adaptive Dialog Policy Learning with Hindsight and User Modeling
Reinforcement learning methods have been used to compute dialog policies from language-based interaction experiences.
Guiding Robot Exploration in Reinforcement Learning via Automated Planning
Reinforcement learning (RL) enables an agent to learn from trial-and-error experiences toward achieving long-term goals; automated planning aims to compute plans for accomplishing tasks using action knowledge.
AutoEG: Automated Experience Grafting for Off-Policy Deep Reinforcement Learning
First, we develop an algorithm, called Experience Grafting (EG), to enable RL agents to reorganize segments of the few high-quality trajectories from the experience pool to generate many synthetic trajectories while retaining the quality.
iCORPP: Interleaved Commonsense Reasoning and Probabilistic Planning on Robots
Robot sequential decision-making in the real world is a challenge because it requires the robots to simultaneously reason about the current world state and dynamics, while planning actions to accomplish complex tasks.
Bridging Commonsense Reasoning and Probabilistic Planning via a Probabilistic Action Language
In this paper, we present a unified framework to integrate icorpp's reasoning and planning components.
Learning and Reasoning for Robot Sequential Decision Making under Uncertainty
The key contribution of this work is a robot SDM framework, called LCORPP, that supports the simultaneous capabilities of supervised learning for passive state estimation, automated reasoning with declarative human knowledge, and planning under uncertainty toward achieving long-term goals.
Integrating Task-Motion Planning with Reinforcement Learning for Robust Decision Making in Mobile Robots
In the outer loop, the plan is executed, and the robot learns from the execution experience via model-free RL, to further improve its task-motion plans.
Robot Representation and Reasoning with Knowledge from Reinforcement Learning
In this work, we integrate logical-probabilistic KRR with model-based RL, enabling agents to simultaneously reason with declarative knowledge and learn from interaction experiences.
Goal-oriented Dialogue Policy Learning from Failures
Reinforcement learning methods have been used for learning dialogue policies.
Sentence Weighting for Neural Machine Translation Domain Adaptation
In this paper, we propose a new sentence weighting method for the domain adaptation of neural machine translation.

Task Planning in Robotics: an Empirical Comparison of PDDL-based and ASP-based Systems
PDDL is designed for task planning, and PDDL-based planners are widely used for a variety of planning problems.
REBA: A Refinement-Based Architecture for Knowledge Representation and Reasoning in Robotics
This paper describes an architecture for robots that combines the complementary strengths of probabilistic graphical models and declarative programming to represent and reason with logic-based and probabilistic descriptions of uncertainty and domain knowledge.
KR$^3$: An Architecture for Knowledge Representation and Reasoning in Robotics
This paper describes an architecture that combines the complementary strengths of declarative programming and probabilistic graphical models to enable robots to represent, reason with, and learn from, qualitative and quantitative descriptions of uncertainty and knowledge.
Combining Answer Set Programming and POMDPs for Knowledge Representation and Reasoning on Mobile Robots
For widespread deployment in domains characterized by partial observability, non-deterministic actions and unforeseen changes, robots need to adapt sensing, processing and interaction with humans to the tasks at hand.
