Search Results for author:
Found 22 papers, 9 papers with code
Premier-TACO is a Few-Shot Policy Learner: Pretraining Multitask Representation via Temporal Action-Driven Contrastive Loss
We present Premier-TACO, a multitask feature representation learning approach designed to improve few-shot policy learning efficiency in sequential decision-making tasks.

Is Imitation All You Need? Generalized Decision-Making with Dual-Phase Training
We introduce DualMind, a generalist agent designed to tackle various decision-making tasks that addresses challenges posed by current methods, such as overfitting behaviors and dependence on task-specific fine-tuning.
TACO: Temporal Latent Action-Driven Contrastive Loss for Visual Reinforcement Learning
Despite recent progress in reinforcement learning (RL) from raw pixel data, sample inefficiency continues to present a substantial obstacle.

SMART: Self-supervised Multi-task pretrAining with contRol Transformers
Self-supervised pretraining has been extensively studied in language and vision domains, where a unified model can be easily adapted to various downstream tasks by pretraining representations without explicit labels.
Masked Autoencoders for Egocentric Video Understanding @ Ego4D Challenge 2022
In this report, we present our approach and empirical results of applying masked autoencoders in two egocentric video understanding tasks, namely, Object State Change Classification and PNR Temporal Localization, of Ego4D Challenge 2022.
PACT: Perception-Action Causal Transformer for Autoregressive Robotics Pre-Training
Robotics has long been a field riddled with complex systems architectures whose modules and connections, whether traditional or learning-based, require significant human expertise and prior knowledge.
LATTE: LAnguage Trajectory TransformEr
Natural language is one of the most intuitive ways to express human intent.
Reshaping Robot Trajectories Using Natural Language Commands: A Study of Multi-Modal Data Alignment Using Transformers
However, using language is seldom an easy task when humans need to express their intent towards robots, since most of the current language interfaces require rigid templates with a static set of action targets and commands.

Contrastive Learning of Global and Local Video Representations
In this work, we propose to learn video representations that generalize to both the tasks which require global semantic information (e. g., classification) and the tasks that require local fine-grained spatio-temporal information (e. g., localization).

A Neural Network-Based Linguistic Similarity Measure for Entrainment in Conversations
Then we use the model to perform similarity measure in a corpus-based entrainment analysis.
CausalCity: Complex Simulations with Agency for Causal Discovery and Reasoning
The ability to perform causal and counterfactual reasoning are central properties of human intelligence.

Contrastive Learning of Global-Local Video Representations
In this work, we propose to learn video representations that generalize to both the tasks which require global semantic information (e. g., classification) and the tasks that require local fine-grained spatio-temporal information (e. g., localization).
Contrastive Self-Supervised Learning of Global-Local Audio-Visual Representations
Contrastive self-supervised learning has delivered impressive results in many audio-visual recognition tasks.
Active Contrastive Learning of Audio-Visual Video Representations
Contrastive learning has been shown to produce generalizable representations of audio and visual data by maximizing the lower bound on the mutual information (MI) between different views of an instance.

Multi-Reference Neural TTS Stylization with Adversarial Cycle Consistency
We use this method to transfer emotion from a dataset containing four emotions to a dataset with only a single emotion.

Unpaired Image-to-Speech Synthesis with Multimodal Information Bottleneck
We propose a multimodal information bottleneck approach that learns the correspondence between modalities from unpaired data (image and speech) by leveraging the shared modality (text).


M3D-GAN: Multi-Modal Multi-Domain Translation with Universal Attention
Generative adversarial networks have led to significant advances in cross-modal/domain translation.


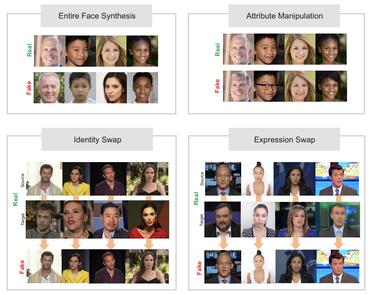
Characterizing Bias in Classifiers using Generative Models
Models that are learned from real-world data are often biased because the data used to train them is biased.

Neural TTS Stylization with Adversarial and Collaborative Games
The synthesized audio waveform is expected to contain the verbal content of x_txt and the auditory style of x_aud.
DA-GAN: Instance-Level Image Translation by Deep Attention Generative Adversarial Networks
Specifically, we jointly learn a deep attention encoder, and the instance-level correspondences could be consequently discovered through attending on the learned instances.

DA-GAN: Instance-level Image Translation by Deep Attention Generative Adversarial Networks (with Supplementary Materials)
Specifically, we jointly learn a deep attention encoder, and the instancelevel correspondences could be consequently discovered through attending on the learned instance pairs.
A-Lamp: Adaptive Layout-Aware Multi-Patch Deep Convolutional Neural Network for Photo Aesthetic Assessment
However, the performance of these deep CNN methods is often compromised by the constraint that the neural network only takes the fixed-size input.
 Ranked #2 on
Aesthetics Quality Assessment
on AVA
Ranked #2 on
Aesthetics Quality Assessment
on AVA