Search Results for author:
Found 36 papers, 14 papers with code
GHNeRF: Learning Generalizable Human Features with Efficient Neural Radiance Fields
In this paper, we introduce a novel approach, termed GHNeRF, designed to address these limitations by learning 2D/3D joint locations of human subjects with NeRF representation.
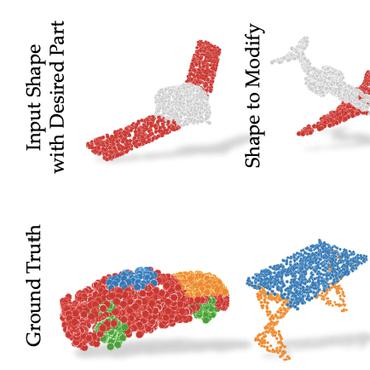
Constrained 6-DoF Grasp Generation on Complex Shapes for Improved Dual-Arm Manipulation
Efficiently generating grasp poses tailored to specific regions of an object is vital for various robotic manipulation tasks, especially in a dual-arm setup.

AnyHome: Open-Vocabulary Generation of Structured and Textured 3D Homes
Inspired by cognitive theories, we introduce AnyHome, a framework that translates any text into well-structured and textured indoor scenes at a house-scale.
MANUS: Markerless Grasp Capture using Articulated 3D Gaussians
Since our representation uses Gaussian primitives, it enables us to efficiently and accurately estimate contacts between the hand and the object.
Strata-NeRF : Neural Radiance Fields for Stratified Scenes
We propose Strata-NeRF, a single neural radiance field that implicitly captures a scene with multiple levels.
DiVa-360: The Dynamic Visual Dataset for Immersive Neural Fields
Advances in neural fields are enabling high-fidelity capture of the shape and appearance of dynamic 3D scenes.
HyP-NeRF: Learning Improved NeRF Priors using a HyperNetwork
Neural Radiance Fields (NeRF) have become an increasingly popular representation to capture high-quality appearance and shape of scenes and objects.
Semantic Attention Flow Fields for Monocular Dynamic Scene Decomposition
From video, we reconstruct a neural volume that captures time-varying color, density, scene flow, semantics, and attention information.

LEGO-Net: Learning Regular Rearrangements of Objects in Rooms
Humans universally dislike the task of cleaning up a messy room.
SCARP: 3D Shape Completion in ARbitrary Poses for Improved Grasping
Unlike existing methods that depend on an external canonicalization, SCARP performs canonicalization, pose estimation, and shape completion in a single network, improving the performance by 45% over the existing baselines.


Canonical Fields: Self-Supervised Learning of Pose-Canonicalized Neural Fields
We present Canonical Field Network (CaFi-Net), a self-supervised method to canonicalize the 3D pose of instances from an object category represented as neural fields, specifically neural radiance fields (NeRFs).

CLIP-Sculptor: Zero-Shot Generation of High-Fidelity and Diverse Shapes from Natural Language
Recent works have demonstrated that natural language can be used to generate and edit 3D shapes.

ShapeCrafter: A Recursive Text-Conditioned 3D Shape Generation Model
Results show that our method can generate shapes consistent with text descriptions, and shapes evolve gradually as more phrases are added.
Unsupervised Kinematic Motion Detection for Part-segmented 3D Shape Collections
We operationalize this concept with an algorithm that optimizes a shape's part motion parameters such that it can transform into other shapes in the collection.
NeuralODF: Learning Omnidirectional Distance Fields for 3D Shape Representation
We propose Omnidirectional Distance Fields (ODFs), a new 3D shape representation that encodes geometry by storing the depth to the object's surface from any 3D position in any viewing direction.

ConDor: Self-Supervised Canonicalization of 3D Pose for Partial Shapes
ConDor is a self-supervised method that learns to Canonicalize the 3D orientation and position for full and partial 3D point clouds.
Learning Body-Aware 3D Shape Generative Models
The body-shape-conditioned models produce chairs which will be comfortable for a person with the given body shape; the pose-conditioned models produce chairs which accommodate the given sitting pose.
Neural Fields in Visual Computing and Beyond
Recent advances in machine learning have created increasing interest in solving visual computing problems using a class of coordinate-based neural networks that parametrize physical properties of scenes or objects across space and time.

StrobeNet: Category-Level Multiview Reconstruction of Articulated Objects
We present StrobeNet, a method for category-level 3D reconstruction of articulating objects from one or more unposed RGB images.
HuMoR: 3D Human Motion Model for Robust Pose Estimation
We introduce HuMoR: a 3D Human Motion Model for Robust Estimation of temporal pose and shape.
DRACO: Weakly Supervised Dense Reconstruction And Canonicalization of Objects
We present DRACO, a method for Dense Reconstruction And Canonicalization of Object shape from one or more RGB images.
Pix2Surf: Learning Parametric 3D Surface Models of Objects from Images
We investigate the problem of learning to generate 3D parametric surface representations for novel object instances, as seen from one or more views.
CaSPR: Learning Canonical Spatiotemporal Point Cloud Representations
We propose CaSPR, a method to learn object-centric Canonical Spatiotemporal Point Cloud Representations of dynamically moving or evolving objects.
Representation Learning Through Latent Canonicalizations
We seek to learn a representation on a large annotated data source that generalizes to a target domain using limited new supervision.
Continuous Geodesic Convolutions for Learning on 3D Shapes
In this work, we wish to challenge this practice and use a neural network to learn descriptors directly from the raw mesh.
Predicting the Physical Dynamics of Unseen 3D Objects
Experiments show that we can accurately predict the changes in state for unseen object geometries and initial conditions.
Multiview Aggregation for Learning Category-Specific Shape Reconstruction
We investigate the problem of learning category-specific 3D shape reconstruction from a variable number of RGB views of previously unobserved object instances.

Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation
The goal of this paper is to estimate the 6D pose and dimensions of unseen object instances in an RGB-D image.
 Ranked #2 on
6D Pose Estimation using RGBD
on CAMERA25
Ranked #2 on
6D Pose Estimation using RGBD
on CAMERA25


Learning Generalizable Physical Dynamics of 3D Rigid Objects
In this work, we focus on predicting the dynamics of 3D rigid objects, in particular an object's final resting position and total rotation when subjected to an impulsive force.

Single-Shot Multi-Person 3D Pose Estimation From Monocular RGB
Our approach uses novel occlusion-robust pose-maps (ORPM) which enable full body pose inference even under strong partial occlusions by other people and objects in the scene.
 Ranked #3 on
3D Multi-Person Pose Estimation (root-relative)
on MuPoTS-3D
(MPJPE metric)
Ranked #3 on
3D Multi-Person Pose Estimation (root-relative)
on MuPoTS-3D
(MPJPE metric)
 3D Human Pose Estimation
3D Human Pose Estimation
 3D Multi-Person Pose Estimation (absolute)
+2
3D Multi-Person Pose Estimation (absolute)
+2
GANerated Hands for Real-time 3D Hand Tracking from Monocular RGB
We address the highly challenging problem of real-time 3D hand tracking based on a monocular RGB-only sequence.

VNect: Real-time 3D Human Pose Estimation with a Single RGB Camera
A real-time kinematic skeleton fitting method uses the CNN output to yield temporally stable 3D global pose reconstructions on the basis of a coherent kinematic skeleton.
 Ranked #16 on
Pose Estimation
on Leeds Sports Poses
Ranked #16 on
Pose Estimation
on Leeds Sports Poses
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor
We present an approach for real-time, robust and accurate hand pose estimation from moving egocentric RGB-D cameras in cluttered real environments.


Real-time Joint Tracking of a Hand Manipulating an Object from RGB-D Input
However, due to difficult occlusions, fast motions, and uniform hand appearance, jointly tracking hand and object pose is more challenging than tracking either of the two separately.

Fast and Robust Hand Tracking Using Detection-Guided Optimization
In the optimization step, a novel objective function combines the detected part labels and a Gaussian mixture representation of the depth to estimate a pose that best fits the depth.
Real-Time Hand Tracking Using a Sum of Anisotropic Gaussians Model
In this paper, we propose a new approach that tracks the full skeleton motion of the hand from multiple RGB cameras in real-time.
