Search Results for author:
Found 132 papers, 66 papers with code
Two Effects, One Trigger: On the Modality Gap, Object Bias, and Information Imbalance in Contrastive Vision-Language Representation Learning
This revealed that the driving factor behind both, the modality gap and the object bias, is the information imbalance between images and captions.
DITTO: Demonstration Imitation by Trajectory Transformation
Subsequently, in the live online trajectory generation stage, we first \mbox{re-detect} all objects, then we warp the demonstration trajectory to the current scene, and finally, we trace the trajectory with the robot.

Constrained Reinforcement Learning with Smoothed Log Barrier Function
However, for many real-world problems, it is often more convenient to formulate optimization problems in terms of rewards and constraints simultaneously.
Open-ended VQA benchmarking of Vision-Language models by exploiting Classification datasets and their semantic hierarchy
The evaluation of text-generative vision-language models is a challenging yet crucial endeavor.
Is Mamba Capable of In-Context Learning?
This work provides empirical evidence that Mamba, a newly proposed selective structured state space model, has similar in-context learning (ICL) capabilities as transformers.
Neural Point Cloud Diffusion for Disentangled 3D Shape and Appearance Generation
However, none of the existing models enable disentangled generation to control the shape and appearance separately.
Amodal Optical Flow
Optical flow estimation is very challenging in situations with transparent or occluded objects.
Eureka-Moments in Transformers: Multi-Step Tasks Reveal Softmax Induced Optimization Problems
In this work, we study rapid, step-wise improvements of the loss in transformers when being confronted with multi-step decision tasks.
Latent Diffusion Counterfactual Explanations
LDCE harnesses the capabilities of recent class- or text-conditional foundation latent diffusion models to expedite counterfactual generation and focus on the important, semantic parts of the data.
Climate-sensitive Urban Planning through Optimization of Tree Placements
We show the efficacy of our approach across a wide spectrum of study areas and time scales.
Compositional Servoing by Recombining Demonstrations
In this work, we present a framework that formulates the visual servoing task as graph traversal.
Unsupervised Open-Vocabulary Object Localization in Videos
In this paper, we show that recent advances in video representation learning and pre-trained vision-language models allow for substantial improvements in self-supervised video object localization.
Object-Centric Multiple Object Tracking
Unsupervised object-centric learning methods allow the partitioning of scenes into entities without additional localization information and are excellent candidates for reducing the annotation burden of multiple-object tracking (MOT) pipelines.
Anomaly Detection with Conditioned Denoising Diffusion Models
In this paper, we introduce Denoising Diffusion Anomaly Detection (DDAD), a novel denoising process for image reconstruction conditioned on a target image.
 Ranked #2 on
Anomaly Detection
on MVTec AD
Ranked #2 on
Anomaly Detection
on MVTec AD


Best Practices in Active Learning for Semantic Segmentation
Active learning is particularly of interest for semantic segmentation, where annotations are costly.
Open-vocabulary Attribute Detection
The objective of the novel task and benchmark is to probe object-level attribute information learned by vision-language models.


Far Away in the Deep Space: Dense Nearest-Neighbor-Based Out-of-Distribution Detection
In this paper, we show that nearest-neighbor approaches also yield state-of-the-art results on dense novelty detection in complex driving scenes when working with an appropriate feature representation.
 Ranked #1 on
Anomaly Detection
on Fishyscapes L&F
(using extra training data)
Ranked #1 on
Anomaly Detection
on Fishyscapes L&F
(using extra training data)
Construction of Hierarchical Neural Architecture Search Spaces based on Context-free Grammars
In this work, we introduce a unifying search space design framework based on context-free grammars that can naturally and compactly generate expressive hierarchical search spaces that are 100s of orders of magnitude larger than common spaces from the literature.

Bridging the Gap to Real-World Object-Centric Learning
Humans naturally decompose their environment into entities at the appropriate level of abstraction to act in the world.
SF2SE3: Clustering Scene Flow into SE(3)-Motions via Proposal and Selection
SF2SE3 then iteratively (1) samples pixel sets to compute SE(3)-motion proposals, and (2) selects the best SE(3)-motion proposal with respect to a maximum coverage formulation.


A Benchmark and a Baseline for Robust Multi-view Depth Estimation
We show that recent approaches do not generalize across datasets in this setting.
Probing Contextual Diversity for Dense Out-of-Distribution Detection
Detection of out-of-distribution (OoD) samples in the context of image classification has recently become an area of interest and active study, along with the topic of uncertainty estimation, to which it is closely related.
 Out-of-Distribution Detection
Out of Distribution (OOD) Detection
+2
Out-of-Distribution Detection
Out of Distribution (OOD) Detection
+2
Assaying Out-Of-Distribution Generalization in Transfer Learning
Since out-of-distribution generalization is a generally ill-posed problem, various proxy targets (e. g., calibration, adversarial robustness, algorithmic corruptions, invariance across shifts) were studied across different research programs resulting in different recommendations.
Adversarial Robustness
Out-of-Distribution Generalization
+1
Unsupervised Semantic Segmentation with Self-supervised Object-centric Representations
In this paper, we show that recent advances in self-supervised feature learning enable unsupervised object discovery and semantic segmentation with a performance that matches the state of the field on supervised semantic segmentation 10 years ago.
Pixel-level Correspondence for Self-Supervised Learning from Video
While self-supervised learning has enabled effective representation learning in the absence of labels, for vision, video remains a relatively untapped source of supervision.


Conditional Visual Servoing for Multi-Step Tasks
Visual Servoing has been effectively used to move a robot into specific target locations or to track a recorded demonstration.
Localized Vision-Language Matching for Open-vocabulary Object Detection
In this work, we propose an open-vocabulary object detection method that, based on image-caption pairs, learns to detect novel object classes along with a given set of known classes.
NeuRL: Closed-form Inverse Reinforcement Learning for Neural Decoding
However, since generally there is a strong connection between learning of subjects and their expectations on long-term rewards, we propose NeuRL, an inverse reinforcement learning approach that (1) extracts an intrinsic reward function from collected trajectories of a subject in closed form, (2) maps neural signals to this intrinsic reward to account for long-term dependencies in the behavior and (3) predicts the simulated behavior for unseen neural signals by extracting Q-values and the corresponding Boltzmann policy based on the intrinsic reward values for these unseen neural signals.
Neural Architecture Search for Dense Prediction Tasks in Computer Vision
The success of deep learning in recent years has lead to a rising demand for neural network architecture engineering.
Ranking Info Noise Contrastive Estimation: Boosting Contrastive Learning via Ranked Positives
This paper introduces Ranking Info Noise Contrastive Estimation (RINCE), a new member in the family of InfoNCE losses that preserves a ranked ordering of positive samples.
Search for temporal cell segmentation robustness in phase-contrast microscopy videos
Studying cell morphology changes in time is critical to understanding cell migration mechanisms.
Unsupervised Object Learning via Common Fate
Learning generative object models from unlabelled videos is a long standing problem and required for causal scene modeling.
You Mostly Walk Alone: Analyzing Feature Attribution in Trajectory Prediction
Applying this procedure to state-of-the-art trajectory prediction methods on standard benchmark datasets shows that they are, in fact, unable to reason about interactions.
CrossCLR: Cross-modal Contrastive Learning For Multi-modal Video Representations
Contrastive learning allows us to flexibly define powerful losses by contrasting positive pairs from sets of negative samples.
Multi-headed Neural Ensemble Search
Ensembles of CNN models trained with different seeds (also known as Deep Ensembles) are known to achieve superior performance over a single copy of the CNN.
Test-Time Adaptation to Distribution Shift by Confidence Maximization and Input Transformation
This paper focuses on the fully test-time adaptation setting, where only unlabeled data from the target distribution is required.
Towards Total Recall in Industrial Anomaly Detection
Being able to spot defective parts is a critical component in large-scale industrial manufacturing.
 Ranked #3 on
Anomaly Detection
on AeBAD-V
Ranked #3 on
Anomaly Detection
on AeBAD-V
Contrastive Representation Learning for Hand Shape Estimation
This work presents improvements in monocular hand shape estimation by building on top of recent advances in unsupervised learning.

Semi-Supervised Disparity Estimation with Deep Feature Reconstruction
Despite the success of deep learning in disparity estimation, the domain generalization gap remains an issue.
Test-Time Adaptation to Distribution Shifts by Confidence Maximization and Input Transformation
This paper focuses on the fully test-time adaptation setting, where only unlabeled data from the target distribution is required.
Pre-training of Deep RL Agents for Improved Learning under Domain Randomization
Visual domain randomization in simulated environments is a widely used method to transfer policies trained in simulation to real robots.
Fostering Generalization in Single-view 3D Reconstruction by Learning a Hierarchy of Local and Global Shape Priors
Single-view 3D object reconstruction has seen much progress, yet methods still struggle generalizing to novel shapes unseen during training.

Improving robustness against common corruptions with frequency biased models
CNNs perform remarkably well when the training and test distributions are i. i. d, but unseen image corruptions can cause a surprisingly large drop in performance.

Towards Understanding Adversarial Robustness of Optical Flow Networks
We show how these mistakes can be rectified in order to make optical flow networks robust to physical patch-based attacks.
On Exposing the Challenging Long Tail in Future Prediction of Traffic Actors
Predicting the states of dynamic traffic actors into the future is important for autonomous systems to operate safelyand efficiently.
Essentials for Class Incremental Learning
Contemporary neural networks are limited in their ability to learn from evolving streams of training data.


Recovering the Imperfect: Cell Segmentation in the Presence of Dynamically Localized Proteins
In this paper, we provide a solution to segmentation of imperfect data through time based on temporal propagation and uncertainty estimation.

COOT: Cooperative Hierarchical Transformer for Video-Text Representation Learning
Many real-world video-text tasks involve different levels of granularity, such as frames and words, clip and sentences or videos and paragraphs, each with distinct semantics.
 Ranked #4 on
Video Captioning
on ActivityNet Captions
Ranked #4 on
Video Captioning
on ActivityNet Captions
Beyond Single Stage Encoder-Decoder Networks: Deep Decoders for Semantic Image Segmentation
In order to further improve the architecture we introduce a weight function which aims to re-balance classes to increase the attention of the networks to under-represented objects.
Scaling Imitation Learning in Minecraft
Imitation learning is a powerful family of techniques for learning sensorimotor coordination in immersive environments.
FlowControl: Optical Flow Based Visual Servoing
One-shot imitation is the vision of robot programming from a single demonstration, rather than by tedious construction of computer code.
Explicitly Modeled Attention Maps for Image Classification
Self-attention networks have shown remarkable progress in computer vision tasks such as image classification.


Multimodal Future Localization and Emergence Prediction for Objects in Egocentric View with a Reachability Prior
In this paper, we investigate the problem of anticipating future dynamics, particularly the future location of other vehicles and pedestrians, in the view of a moving vehicle.
Temporal Shift GAN for Large Scale Video Generation
In this paper, we present a network architecture for video generation that models spatio-temporal consistency without resorting to costly 3D architectures.

Optimized Generic Feature Learning for Few-shot Classification across Domains
To learn models or features that generalize across tasks and domains is one of the grand goals of machine learning.
Parting with Illusions about Deep Active Learning
Active learning aims to reduce the high labeling cost involved in training machine learning models on large datasets by efficiently labeling only the most informative samples.
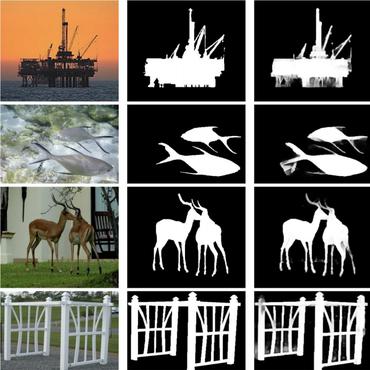
DeepUSPS: Deep Robust Unsupervised Saliency Prediction via Self-supervision
Alternative unsupervised approaches rely on careful selection of multiple handcrafted saliency methods to generate noisy pseudo-ground-truth labels.
Adaptive Curriculum Generation from Demonstrations for Sim-to-Real Visuomotor Control
We propose Adaptive Curriculum Generation from Demonstrations (ACGD) for reinforcement learning in the presence of sparse rewards.
Self-supervised 3D Shape and Viewpoint Estimation from Single Images for Robotics
We present a convolutional neural network for joint 3D shape prediction and viewpoint estimation from a single input image.
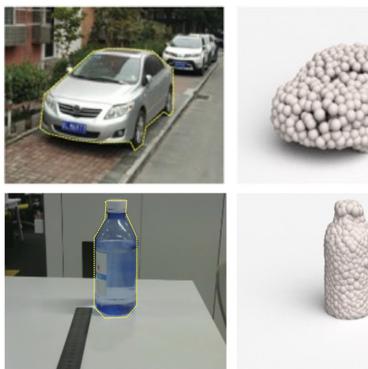 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Reconstruction
+3
3D Reconstruction
+3
SELF: Learning to Filter Noisy Labels with Self-Ensembling
Deep neural networks (DNNs) have been shown to over-fit a dataset when being trained with noisy labels for a long enough time.
DeepUSPS: Deep Robust Unsupervised Saliency Prediction With Self-Supervision
Alternative unsupervised approaches rely on careful selection of multiple handcrafted saliency methods to generate noisy pseudo-ground-truth labels.
CrossNorm: On Normalization for Off-Policy Reinforcement Learning
Off-policy temporal difference (TD) methods are a powerful class of reinforcement learning (RL) algorithms.
Understanding and Robustifying Differentiable Architecture Search
Differentiable Architecture Search (DARTS) has attracted a lot of attention due to its simplicity and small search costs achieved by a continuous relaxation and an approximation of the resulting bi-level optimization problem.
FreiHAND: A Dataset for Markerless Capture of Hand Pose and Shape from Single RGB Images
We show that methods trained on our dataset consistently perform well when tested on other datasets.
 Ranked #8 on
3D Hand Pose Estimation
on FreiHAND
Ranked #8 on
3D Hand Pose Estimation
on FreiHAND

Semi-Supervised Semantic Segmentation with High- and Low-level Consistency
The ability to understand visual information from limited labeled data is an important aspect of machine learning.

Group Pruning using a Bounded-Lp norm for Group Gating and Regularization
We achieve state-of-the-art pruning results for ResNet-50 with higher accuracy on ImageNet.
Overcoming Limitations of Mixture Density Networks: A Sampling and Fitting Framework for Multimodal Future Prediction
Future prediction is a fundamental principle of intelligence that helps plan actions and avoid possible dangers.
Robust Learning Under Label Noise With Iterative Noise-Filtering
We consider the problem of training a model under the presence of label noise.
AutoDispNet: Improving Disparity Estimation With AutoML
In this work, we show how to use and extend existing AutoML techniques to efficiently optimize large-scale U-Net-like encoder-decoder architectures.
What Do Single-view 3D Reconstruction Networks Learn?
Convolutional networks for single-view object reconstruction have shown impressive performance and have become a popular subject of research.
 Ranked #1 on
3D Reconstruction
on 300W
Ranked #1 on
3D Reconstruction
on 300W
Learning Representations for Predicting Future Activities
Foreseeing the future is one of the key factors of intelligence.
Consistency-based anomaly detection with adaptive multiple-hypotheses predictions
Thus, due to the lack of representative data, the wide-spread discriminative approaches cannot cover such learning tasks, and rather generative models, which attempt to learn the input density of the normal cases, are used.
MAIN: Multi-Attention Instance Network for Video Segmentation
Instance-level video segmentation requires a solid integration of spatial and temporal information.
CAM-Convs: Camera-Aware Multi-Scale Convolutions for Single-View Depth
Single-view depth estimation suffers from the problem that a network trained on images from one camera does not generalize to images taken with a different camera model.

CrossQ: Batch Normalization in Deep Reinforcement Learning for Greater Sample Efficiency and Simplicity
Sample efficiency is a crucial problem in deep reinforcement learning.
Motion Perception in Reinforcement Learning with Dynamic Objects
In dynamic environments, learned controllers are supposed to take motion into account when selecting the action to be taken.
Defending Against Universal Perturbations With Shared Adversarial Training
Classifiers such as deep neural networks have been shown to be vulnerable against adversarial perturbations on problems with high-dimensional input space.

Anomaly Detection With Multiple-Hypotheses Predictions
In one-class-learning tasks, only the normal case (foreground) can be modeled with data, whereas the variation of all possible anomalies is too erratic to be described by samples.
FusionNet and AugmentedFlowNet: Selective Proxy Ground Truth for Training on Unlabeled Images
The latter can be used as proxy-ground-truth to train a network on real-world data and to adapt it to specific domains of interest.
Occlusions, Motion and Depth Boundaries with a Generic Network for Disparity, Optical Flow or Scene Flow Estimation
Making use of the estimated occlusions, we also show improved results on motion segmentation and scene flow estimation.
DeepTAM: Deep Tracking and Mapping
For mapping, we accumulate information in a cost volume centered at the current depth estimate.
TD or not TD: Analyzing the Role of Temporal Differencing in Deep Reinforcement Learning
Our understanding of reinforcement learning (RL) has been shaped by theoretical and empirical results that were obtained decades ago using tabular representations and linear function approximators.
ECO: Efficient Convolutional Network for Online Video Understanding
In this paper, we introduce a network architecture that takes long-term content into account and enables fast per-video processing at the same time.
 Ranked #65 on
Action Recognition
on Something-Something V1
Ranked #65 on
Action Recognition
on Something-Something V1


3D Human Pose Estimation in RGBD Images for Robotic Task Learning
We propose an approach to estimate 3D human pose in real world units from a single RGBD image and show that it exceeds performance of monocular 3D pose estimation approaches from color as well as pose estimation exclusively from depth.
 Ranked #14 on
3D Human Pose Estimation
on Total Capture
Ranked #14 on
3D Human Pose Estimation
on Total Capture


Uncertainty Estimates and Multi-Hypotheses Networks for Optical Flow
Optical flow estimation can be formulated as an end-to-end supervised learning problem, which yields estimates with a superior accuracy-runtime tradeoff compared to alternative methodology.
What Makes Good Synthetic Training Data for Learning Disparity and Optical Flow Estimation?
The finding that very large networks can be trained efficiently and reliably has led to a paradigm shift in computer vision from engineered solutions to learning formulations.
Sparsity Invariant CNNs
In this paper, we consider convolutional neural networks operating on sparse inputs with an application to depth upsampling from sparse laser scan data.
 Ranked #16 on
Depth Completion
on KITTI Depth Completion
Ranked #16 on
Depth Completion
on KITTI Depth Completion

Artistic style transfer for videos and spherical images
We propose a deep network architecture and training procedures that allow us to stylize arbitrary-length videos in a consistent and stable way, and nearly in real time.

End-to-End Learning of Video Super-Resolution with Motion Compensation
We analyze the usage of optical flow for video super-resolution and find that common off-the-shelf image warping does not allow video super-resolution to benefit much from optical flow.
Joint Graph Decomposition & Node Labeling: Problem, Algorithms, Applications
In order to find feasible solutions efficiently, we define two local search algorithms that converge monotonously to a local optimum, offering a feasible solution at any time.
Topometric Localization with Deep Learning
Compared to LiDAR-based localization methods, which provide high accuracy but rely on expensive sensors, visual localization approaches only require a camera and thus are more cost-effective while their accuracy and reliability typically is inferior to LiDAR-based methods.
Learning to Estimate 3D Hand Pose from Single RGB Images
Low-cost consumer depth cameras and deep learning have enabled reasonable 3D hand pose estimation from single depth images.

Universal Adversarial Perturbations Against Semantic Image Segmentation
We show empirically that there exist barely perceptible universal noise patterns which result in nearly the same predicted segmentation for arbitrary inputs.
Chained Multi-stream Networks Exploiting Pose, Motion, and Appearance for Action Classification and Detection
In this paper, we propose a network architecture that computes and integrates the most important visual cues for action recognition: pose, motion, and the raw images.

Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs
We present a deep convolutional decoder architecture that can generate volumetric 3D outputs in a compute- and memory-efficient manner by using an octree representation.
 Ranked #3 on
3D Reconstruction
on Data3D−R2N2
Ranked #3 on
3D Reconstruction
on Data3D−R2N2
Lucid Data Dreaming for Video Object Segmentation
Our approach is suitable for both single and multiple object segmentation.

Adversarial Examples for Semantic Image Segmentation
Machine learning methods in general and Deep Neural Networks in particular have shown to be vulnerable to adversarial perturbations.
Hybrid Learning of Optical Flow and Next Frame Prediction to Boost Optical Flow in the Wild
With the help of a sample-variant multi-tasking architecture, the network is trained on different tasks depending on the availability of ground-truth.
DeMoN: Depth and Motion Network for Learning Monocular Stereo
In this paper we formulate structure from motion as a learning problem.
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks
Particularly on small displacements and real-world data, FlowNet cannot compete with variational methods.

Dense Pixel Correspondence Estimation
 Optical Flow Estimation
+1
Optical Flow Estimation
+1
Protein contact prediction from amino acid co-evolution using convolutional networks for graph-valued images
A contact map is a compact representation of the three-dimensional structure of a protein via the pairwise contacts between the amino acid constituting the protein.
Joint Graph Decomposition and Node Labeling: Problem, Algorithms, Applications
In order to find feasible solutions efficiently, we define two local search algorithms that converge monotonously to a local optimum, offering a feasible solution at any time.
Object Detection, Tracking, and Motion Segmentation for Object-level Video Segmentation
In contrast to most tracking methods, it provides an accurate, temporally consistent segmentation of each object.
A Multi-cut Formulation for Joint Segmentation and Tracking of Multiple Objects
Recently, Minimum Cost Multicut Formulations have been proposed and proven to be successful in both motion trajectory segmentation and multi-target tracking scenarios.
3D U-Net: Learning Dense Volumetric Segmentation from Sparse Annotation
This paper introduces a network for volumetric segmentation that learns from sparsely annotated volumetric images.
 Ranked #26 on
3D Instance Segmentation
on ScanNet(v2)
Ranked #26 on
3D Instance Segmentation
on ScanNet(v2)

Point-wise mutual information-based video segmentation with high temporal consistency
In this paper, we tackle the problem of temporally consistent boundary detection and hierarchical segmentation in videos.
Synthesizing the preferred inputs for neurons in neural networks via deep generator networks
Understanding the inner workings of such computational brains is both fascinating basic science that is interesting in its own right - similar to why we study the human brain - and will enable researchers to further improve DNNs.
Artistic style transfer for videos
We present an approach that transfers the style from one image (for example, a painting) to a whole video sequence.
Pixel-level Encoding and Depth Layering for Instance-level Semantic Labeling
Recent approaches for instance-aware semantic labeling have augmented convolutional neural networks (CNNs) with complex multi-task architectures or computationally expensive graphical models.

Orientation-boosted Voxel Nets for 3D Object Recognition
In this paper, we show that the object orientation plays an important role in 3D recognition.
 Ranked #2 on
3D Object Classification
on ModelNet10
Ranked #2 on
3D Object Classification
on ModelNet10

Generating Images with Perceptual Similarity Metrics based on Deep Networks
This metric better reflects perceptually similarity of images and thus leads to better results.

A Large Dataset to Train Convolutional Networks for Disparity, Optical Flow, and Scene Flow Estimation
By combining a flow and disparity estimation network and training it jointly, we demonstrate the first scene flow estimation with a convolutional network.
Motion Trajectory Segmentation via Minimum Cost Multicuts
For the segmentation of moving objects in videos, the analysis of long-term point trajectories has been very popular recently.
Video Segmentation With Just a Few Strokes
As the use of videos is becoming more popular in computer vision, the need for annotated video datasets increases.
Global, Dense Multiscale Reconstruction for a Billion Points
We present a variational approach for surface reconstruction from a set of oriented points with scale information.
Unsupervised Generation of a Viewpoint Annotated Car Dataset From Videos
Object recognition approaches have recently been extended to yield, aside of the object class output, also viewpoint or pose.

Multi-view 3D Models from Single Images with a Convolutional Network
We present a convolutional network capable of inferring a 3D representation of a previously unseen object given a single image of this object.
Inverting Visual Representations with Convolutional Networks
Inverting a deep network trained on ImageNet provides several insights into the properties of the feature representation learned by the network.
Learning to Generate Chairs With Convolutional Neural Networks
We train a generative convolutional neural network which is able to generate images of objects given object type, viewpoint, and color.
Efficient Decomposition of Image and Mesh Graphs by Lifted Multicuts
a pixel grid graph have received little attention, firstly, because the MP is NP-hard and instances w. r. t.
U-Net: Convolutional Networks for Biomedical Image Segmentation
There is large consent that successful training of deep networks requires many thousand annotated training samples.
 Ranked #1 on
Semantic Segmentation
on STARE
Ranked #1 on
Semantic Segmentation
on STARE
FlowNet: Learning Optical Flow with Convolutional Networks
Optical flow estimation has not been among the tasks where CNNs were successful.
Striving for Simplicity: The All Convolutional Net
Most modern convolutional neural networks (CNNs) used for object recognition are built using the same principles: Alternating convolution and max-pooling layers followed by a small number of fully connected layers.
 Ranked #117 on
Image Classification
on CIFAR-10
Ranked #117 on
Image Classification
on CIFAR-10
Discriminative Unsupervised Feature Learning with Convolutional Neural Networks
Current methods for training convolutional neural networks depend on large amounts of labeled samples for supervised training.
 Ranked #84 on
Image Classification
on STL-10
Ranked #84 on
Image Classification
on STL-10
Learning to Generate Chairs, Tables and Cars with Convolutional Networks
We train generative 'up-convolutional' neural networks which are able to generate images of objects given object style, viewpoint, and color.
Discriminative Unsupervised Feature Learning with Exemplar Convolutional Neural Networks
While such generic features cannot compete with class specific features from supervised training on a classification task, we show that they are advantageous on geometric matching problems, where they also outperform the SIFT descriptor.
Spectral Graph Reduction for Efficient Image and Streaming Video Segmentation
In contrast to previous work, the reduced graph is reweighted such that the resulting segmentation is equivalent, under certain assumptions, to that of the full graph.
Descriptor Matching with Convolutional Neural Networks: a Comparison to SIFT
Surprisingly, convolutional neural networks clearly outperform SIFT on descriptor matching.
iPiano: Inertial Proximal Algorithm for Non-Convex Optimization
A rigorous analysis of the algorithm for the proposed class of problems yields global convergence of the function values and the arguments.

Unsupervised feature learning by augmenting single images
We then extend these trivial one-element classes by applying a variety of transformations to the initial 'seed' patches.
An Iterated L1 Algorithm for Non-smooth Non-convex Optimization in Computer Vision
Here we extend the problem class to linearly constrained optimization of a Lipschitz continuous function, which is the sum of a convex function and a function being concave and increasing on the non-negative orthant (possibly non-convex and nonconcave on the whole space).
Blind Deconvolution of Widefield Fluorescence Microscopic Data by Regularization of the Optical Transfer Function (OTF)
With volumetric data from widefield fluorescence microscopy, many emerging questions in biological and biomedical research are being investigated.
