Search Results for author:
Found 23 papers, 10 papers with code
Explicit Attention-Enhanced Fusion for RGB-Thermal Perception Tasks
Specifically, we consider the following cases: i) both RGB data and thermal data, ii) only one of the types of data, and iii) none of them generate discriminative features.
 Ranked #2 on
Thermal Image Segmentation
on Noisy RS RGB-T Dataset
Ranked #2 on
Thermal Image Segmentation
on Noisy RS RGB-T Dataset

Lifelong-MonoDepth: Lifelong Learning for Multi-Domain Monocular Metric Depth Estimation
With the rapid advancements in autonomous driving and robot navigation, there is a growing demand for lifelong learning models capable of estimating metric (absolute) depth.

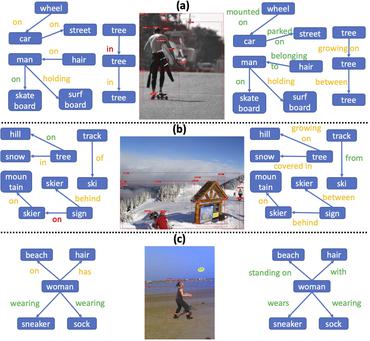
Peer Learning for Unbiased Scene Graph Generation
Unbiased scene graph generation (USGG) is a challenging task that requires predicting diverse and heavily imbalanced predicates between objects in an image.
Attentional Graph Convolutional Network for Structure-aware Audio-Visual Scene Classification
Then, to build multi-scale hierarchical information of input features, we utilize an attention fusion mechanism to aggregate features from multiple layers of the backbone network.
Progressive Self-Distillation for Ground-to-Aerial Perception Knowledge Transfer
In this paper, we introduce the ground-to-aerial perception knowledge transfer and propose a progressive semi-supervised learning framework that enables drone perception using only labeled data of ground viewpoint and unlabeled data of flying viewpoints.
Dense Depth Distillation with Out-of-Distribution Simulated Images
We study data-free knowledge distillation (KD) for monocular depth estimation (MDE), which learns a lightweight model for real-world depth perception tasks by compressing it from a trained teacher model while lacking training data in the target domain.

Context-aware Mixture-of-Experts for Unbiased Scene Graph Generation
Specifically, we propose to integrate the mixture of experts with a divide and ensemble strategy to remedy the severely long-tailed distribution of predicate classes, which is applicable to the majority of unbiased scene graph generators.
Learning to Coordinate for a Worker-Station Multi-robot System in Planar Coverage Tasks
In this paper, we focus on the multi-robot coverage path planning (mCPP) problem in large-scale planar areas with random dynamic interferers in the environment, where the robots have limited resources.
Deep Depth Completion from Extremely Sparse Data: A Survey
Depth completion aims at predicting dense pixel-wise depth from an extremely sparse map captured from a depth sensor, e. g., LiDARs.

Abnormal Occupancy Grid Map Recognition using Attention Network
The occupancy grid map is a critical component of autonomous positioning and navigation in the mobile robotic system, as many other systems' performance depends heavily on it.
FEANet: Feature-Enhanced Attention Network for RGB-Thermal Real-time Semantic Segmentation
To better extract detail spatial information, we propose a two-stage Feature-Enhanced Attention Network (FEANet) for the RGB-T semantic segmentation task.
 Ranked #10 on
Semantic Segmentation
on FMB Dataset
Ranked #10 on
Semantic Segmentation
on FMB Dataset

View Blind-spot as Inpainting: Self-Supervised Denoising with Mask Guided Residual Convolution
Our MGRConv can be regarded as soft partial convolution and find a trade-off among partial convolution, learnable attention maps, and gated convolution.

Learn2Agree: Fitting with Multiple Annotators without Objective Ground Truth
For such issues, we propose a novel Learning to Agreement (Learn2Agree) framework to tackle the challenge of learning from multiple annotators without objective ground truth.
AcousticFusion: Fusing Sound Source Localization to Visual SLAM in Dynamic Environments
Dynamic objects in the environment, such as people and other agents, lead to challenges for existing simultaneous localization and mapping (SLAM) approaches.

PoseFusion2: Simultaneous Background Reconstruction and Human Shape Recovery in Real-time
Dynamic environments that include unstructured moving objects pose a hard problem for Simultaneous Localization and Mapping (SLAM) performance.

Object-to-Scene: Learning to Transfer Object Knowledge to Indoor Scene Recognition
The final results in this work show that OTS successfully extracts object features and learns object relations from the segmentation network.
BORM: Bayesian Object Relation Model for Indoor Scene Recognition
First, we utilize an improved object model (IOM) as a baseline that enriches the object knowledge by introducing a scene parsing algorithm pretrained on the ADE20K dataset with rich object categories related to the indoor scene.
Boosting Light-Weight Depth Estimation Via Knowledge Distillation
However, this KD process can be challenging and insufficient due to the large model capacity gap between the teacher and the student.
Semantic-guided Automatic Natural Image Matting with Trimap Generation Network and Light-weight Non-local Attention
This paper presents a semantic-guided automatic natural image matting pipeline with Trimap Generation Network and light-weight non-local attention, which does not need trimap and background as input.

Towards Better Accuracy-efficiency Trade-offs: Divide and Co-training
Each of these small networks has a fraction of the original one's parameters.
 Ranked #26 on
Image Classification
on CIFAR-10
Ranked #26 on
Image Classification
on CIFAR-10
Semantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment
The core problem of visual multi-robot simultaneous localization and mapping (MR-SLAM) is how to efficiently and accurately perform multi-robot global localization (MR-GL).
A Two-stage Unsupervised Approach for Low light Image Enhancement
However, most of them suffer from the following problems: 1) the need of pairs of low light and normal light images for training, 2) the poor performance for dark images, 3) the amplification of noise.
 Low-Light Image Enhancement
Low-Light Image Enhancement
 Simultaneous Localization and Mapping
+1
Simultaneous Localization and Mapping
+1
IROS 2019 Lifelong Robotic Vision Challenge -- Lifelong Object Recognition Report
This report summarizes IROS 2019-Lifelong Robotic Vision Competition (Lifelong Object Recognition Challenge) with methods and results from the top $8$ finalists (out of over~$150$ teams).

