Search Results for author:
Found 5 papers, 3 papers with code
From Handheld to Unconstrained Object Detection: a Weakly-supervised On-line Learning Approach
We show that the robot can improve adaptation to novel domains, either by interacting with a human teacher (Active Learning) or with an autonomous supervision (Semi-supervised Learning).

Sequence-to-Sequence Natural Language to Humanoid Robot Sign Language
Natural language to sign language translation presents several challenges to developers, such as the discordance between the length of input and output data and the use of non-manual markers.

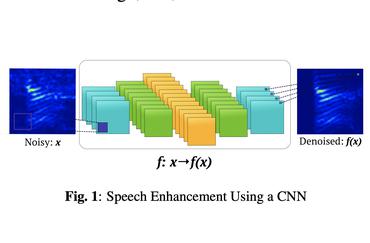
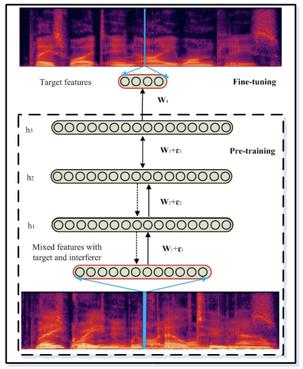
Face Landmark-based Speaker-Independent Audio-Visual Speech Enhancement in Multi-Talker Environments
In this paper, we address the problem of enhancing the speech of a speaker of interest in a cocktail party scenario when visual information of the speaker of interest is available.
 Ranked #1 on
Speech Enhancement
on GRID corpus (mixed-speech)
Ranked #1 on
Speech Enhancement
on GRID corpus (mixed-speech)
Markerless visual servoing on unknown objects for humanoid robot platforms
To precisely reach for an object with a humanoid robot, it is of central importance to have good knowledge of both end-effector, object pose and shape.
Robotics Systems and Control Computation
Visual end-effector tracking using a 3D model-aided particle filter for humanoid robot platforms
This paper addresses recursive markerless estimation of a robot's end-effector using visual observations from its cameras.
Robotics
