Search Results for author:
Found 17 papers, 6 papers with code
NeuSDFusion: A Spatial-Aware Generative Model for 3D Shape Completion, Reconstruction, and Generation
3D shape generation aims to produce innovative 3D content adhering to specific conditions and constraints.


RGB-based Category-level Object Pose Estimation via Decoupled Metric Scale Recovery
While showing promising results, recent RGB-D camera-based category-level object pose estimation methods have restricted applications due to the heavy reliance on depth sensors.


Digging Into Uncertainty-based Pseudo-label for Robust Stereo Matching
Due to the domain differences and unbalanced disparity distribution across multiple datasets, current stereo matching approaches are commonly limited to a specific dataset and generalize poorly to others.

A Representation Separation Perspective to Correspondences-free Unsupervised 3D Point Cloud Registration
Existing correspondences-free methods generally learn the holistic representation of the entire point cloud, which is fragile for partial and noisy point clouds.
End-to-end Learning the Partial Permutation Matrix for Robust 3D Point Cloud Registration
Even though considerable progress has been made in deep learning-based 3D point cloud processing, how to obtain accurate correspondences for robust registration remains a major challenge because existing hard assignment methods cannot deal with outliers naturally.
Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation
Meanwhile, to guarantee that the day and night images contain the same information, the domain-separated network takes the day-time images and corresponding night-time images (generated by GAN) as input, and the private and invariant feature extractors are learned by orthogonality and similarity loss, where the domain gap can be alleviated, thus better depth maps can be expected.
MapFusion: A General Framework for 3D Object Detection with HDMaps
In this paper, we propose a simple but effective framework - MapFusion to integrate the map information into modern 3D object detector pipelines.


IAFA: Instance-aware Feature Aggregation for 3D Object Detection from a Single Image
3D object detection from a single image is an important task in Autonomous Driving (AD), where various approaches have been proposed.
 Ranked #19 on
Monocular 3D Object Detection
on KITTI Cars Moderate
Ranked #19 on
Monocular 3D Object Detection
on KITTI Cars Moderate

FCFR-Net: Feature Fusion based Coarse-to-Fine Residual Learning for Depth Completion
Then, a refined depth map is further obtained using a residual learning strategy in the coarse-to-fine stage with a coarse depth map and color image as input.

PerMO: Perceiving More at Once from a Single Image for Autonomous Driving
We present a novel approach to detect, segment, and reconstruct complete textured 3D models of vehicles from a single image for autonomous driving.

PCW-Net: Pyramid Combination and Warping Cost Volume for Stereo Matching
First, we construct combination volumes on the upper levels of the pyramid and develop a cost volume fusion module to integrate them for initial disparity estimation.
Channel Attention based Iterative Residual Learning for Depth Map Super-Resolution
Second, we propose a new framework for real-world DSR, which consists of four modules : 1) An iterative residual learning module with deep supervision to learn effective high-frequency components of depth maps in a coarse-to-fine manner; 2) A channel attention strategy to enhance channels with abundant high-frequency components; 3) A multi-stage fusion module to effectively re-exploit the results in the coarse-to-fine process; and 4) A depth refinement module to improve the depth map by TGV regularization and input loss.
Learning 2D-3D Correspondences To Solve The Blind Perspective-n-Point Problem
Conventional absolute camera pose via a Perspective-n-Point (PnP) solver often assumes that the correspondences between 2D image pixels and 3D points are given.
IoU Loss for 2D/3D Object Detection
In 2D/3D object detection task, Intersection-over-Union (IoU) has been widely employed as an evaluation metric to evaluate the performance of different detectors in the testing stage.
ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving
Specifically, we first segment each car with a pre-trained Mask R-CNN, and then regress towards its 3D pose and shape based on a deformable 3D car model with or without using semantic keypoints.

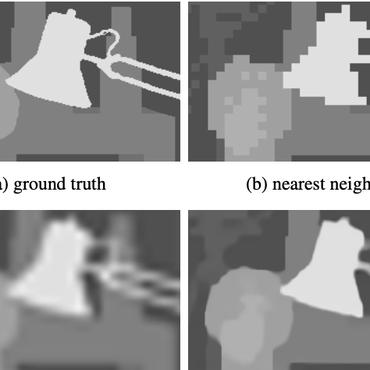
Deeply Supervised Depth Map Super-Resolution as Novel View Synthesis
However, there still exist two major issues with these DCNN based depth map super-resolution methods that hinder the performance: i) The low-resolution depth maps either need to be up-sampled before feeding into the network or substantial deconvolution has to be used; and ii) The supervision (high-resolution depth maps) is only applied at the end of the network, thus it is difficult to handle large up-sampling factors, such as $\times 8, \times 16$.

Deep Depth Super-Resolution : Learning Depth Super-Resolution using Deep Convolutional Neural Network
In this paper, we bridge up the gap and extend the success of deep convolutional neural network to depth super-resolution.

