Search Results for author:
Found 120 papers, 39 papers with code
3D Geometry-aware Deformable Gaussian Splatting for Dynamic View Synthesis
In this way, our solution achieves 3D geometry-aware deformation modeling, which enables improved dynamic view synthesis and 3D dynamic reconstruction.
LRRU: Long-short Range Recurrent Updating Networks for Depth Completion
Existing deep learning-based depth completion methods generally employ massive stacked layers to predict the dense depth map from sparse input data.

Multimodal Variational Auto-encoder based Audio-Visual Segmentation
To achieve this, our ECMVAE factorizes the representations of each modality with a modality-shared representation and a modality-specific representation.

Forward Flow for Novel View Synthesis of Dynamic Scenes
This paper proposes a neural radiance field (NeRF) approach for novel view synthesis of dynamic scenes using forward warping.

RPEFlow: Multimodal Fusion of RGB-PointCloud-Event for Joint Optical Flow and Scene Flow Estimation
Recently, the RGB images and point clouds fusion methods have been proposed to jointly estimate 2D optical flow and 3D scene flow.


Decomposed Guided Dynamic Filters for Efficient RGB-Guided Depth Completion
The decomposed filters not only maintain the favorable properties of guided dynamic filters as being content-dependent and spatially-variant, but also reduce model parameters and hardware costs, as the learned adaptors are decoupled with the number of feature channels.
Unsupervised 3D Pose Estimation with Non-Rigid Structure-from-Motion Modeling
Most of the previous 3D human pose estimation work relied on the powerful memory capability of the network to obtain suitable 2D-3D mappings from the training data.


Improving Audio-Visual Segmentation with Bidirectional Generation
In this paper, inspired by the human ability to mentally simulate the sound of an object and its visual appearance, we introduce a bidirectional generation framework.
Digging into Depth Priors for Outdoor Neural Radiance Fields
However, the shape-radiance ambiguity of radiance fields remains a challenge, especially in the sparse viewpoints setting.
Digging Into Uncertainty-based Pseudo-label for Robust Stereo Matching
Due to the domain differences and unbalanced disparity distribution across multiple datasets, current stereo matching approaches are commonly limited to a specific dataset and generalize poorly to others.
Transferable Attack for Semantic Segmentation
We analysis performance of semantic segmentation models wrt.

Contrastive Conditional Latent Diffusion for Audio-visual Segmentation
We propose a latent diffusion model with contrastive learning for audio-visual segmentation (AVS) to extensively explore the contribution of audio.


Measuring and Modeling Uncertainty Degree for Monocular Depth Estimation
Effectively measuring and modeling the reliability of a trained model is essential to the real-world deployment of monocular depth estimation (MDE) models.
Linearized Relative Positional Encoding
Meanwhile, it emphasizes a general paradigm for designing broadly more relative positional encoding methods that are applicable to linear transformers.


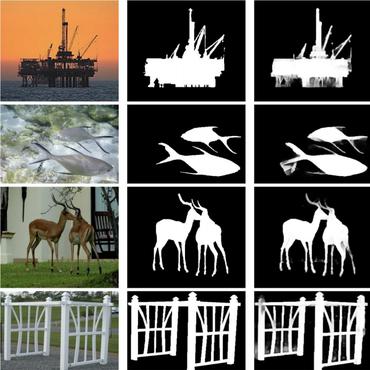
Joint Salient Object Detection and Camouflaged Object Detection via Uncertainty-aware Learning
In this case, salient objects are typically non-camouflaged, and camouflaged objects are usually not salient.
Weakly-supervised Contrastive Learning for Unsupervised Object Discovery
Unsupervised object discovery (UOD) refers to the task of discriminating the whole region of objects from the background within a scene without relying on labeled datasets, which benefits the task of bounding-box-level localization and pixel-level segmentation.
Mutual Information Regularization for Weakly-supervised RGB-D Salient Object Detection
In particular, following the principle of disentangled representation learning, we introduce a mutual information upper bound with a mutual information minimization regularizer to encourage the disentangled representation of each modality for salient object detection.
Toeplitz Neural Network for Sequence Modeling
Sequence modeling has important applications in natural language processing and computer vision.
A Revisit of the Normalized Eight-Point Algorithm and A Self-Supervised Deep Solution
The normalized eight-point algorithm has been widely viewed as the cornerstone in two-view geometry computation, where the seminal Hartley's normalization has greatly improved the performance of the direct linear transformation algorithm.

The Second Monocular Depth Estimation Challenge
This paper discusses the results for the second edition of the Monocular Depth Estimation Challenge (MDEC).
Fine-grained Audible Video Description
We explore a new task for audio-visual-language modeling called fine-grained audible video description (FAVD).
Event-guided Multi-patch Network with Self-supervision for Non-uniform Motion Deblurring
Contemporary deep learning multi-scale deblurring models suffer from many issues: 1) They perform poorly on non-uniformly blurred images/videos; 2) Simply increasing the model depth with finer-scale levels cannot improve deblurring; 3) Individual RGB frames contain a limited motion information for deblurring; 4) Previous models have a limited robustness to spatial transformations and noise.

Efficient LiDAR Point Cloud Oversegmentation Network
Then, to generate homogeneous superpoints from the sparse LiDAR point cloud, we propose a LiDAR point grouping algorithm that simultaneously considers the similarity of point embeddings and the Euclidean distance of points in 3D space.

Joint Appearance and Motion Learning for Efficient Rolling Shutter Correction
Rolling shutter correction (RSC) is becoming increasingly popular for RS cameras that are widely used in commercial and industrial applications.
Modeling the Distributional Uncertainty for Salient Object Detection Models
Most of the existing salient object detection (SOD) models focus on improving the overall model performance, without explicitly explaining the discrepancy between the training and testing distributions.
Masked Representation Learning for Domain Generalized Stereo Matching
Experimental results on multi-datasets show that: (1) our method can be easily plugged into the current various stereo matching models to improve generalization performance; (2) our method can reduce the significant volatility of generalization performance among different training epochs; (3) we find that the current methods prefer to choose the best results among different training epochs as generalization performance, but it is impossible to select the best performance by ground truth in practice.

Learning Dense and Continuous Optical Flow from an Event Camera
In this paper, we propose a novel deep learning-based dense and continuous optical flow estimation framework from a single image with event streams, which facilitates the accurate perception of high-speed motion.
CU-Net: LiDAR Depth-Only Completion With Coupled U-Net
We find that existing depth-only methods can obtain satisfactory results in the areas where the measurement points are almost accurate and evenly distributed (denoted as normal areas), while the performance is limited in the areas where the foreground and background points are overlapped due to occlusion (denoted as overlap areas) and the areas where there are no measurement points around (denoted as blank areas) since the methods have no reliable input information in these areas.
Searching Dense Point Correspondences via Permutation Matrix Learning
In response, this paper presents a novel end-to-end learning-based method to estimate the dense correspondence of 3D point clouds, in which the problem of point matching is formulated as a zero-one assignment problem to achieve a permutation matching matrix to implement the one-to-one principle fundamentally.
Learning a Task-specific Descriptor for Robust Matching of 3D Point Clouds
In this paper, we propose to learn a robust task-specific feature descriptor to consistently describe the correct point correspondence under interference.
Linear Video Transformer with Feature Fixation
Therefore, we propose a feature fixation module to reweight the feature importance of the query and key before computing linear attention.
Deep Idempotent Network for Efficient Single Image Blind Deblurring
Single image blind deblurring is highly ill-posed as neither the latent sharp image nor the blur kernel is known.
Rolling Shutter Inversion: Bring Rolling Shutter Images to High Framerate Global Shutter Video
The RSSR is a very challenging task, and to our knowledge, no practical solution exists to date.

Efficient Spatial-Temporal Information Fusion for LiDAR-Based 3D Moving Object Segmentation
We also use a point refinement module via 3D sparse convolution to fuse the information from both LiDAR range image and point cloud representations and reduce the artifacts on the borders of the objects.

Neural Deformable Voxel Grid for Fast Optimization of Dynamic View Synthesis
The second module contains a density and a color grid to model the geometry and density of the scene.
Context-Aware Video Reconstruction for Rolling Shutter Cameras
Then, a refinement scheme is proposed to guide the GS frame synthesis along with bilateral occlusion masks to produce high-fidelity GS video frames at arbitrary times.

Towards Deeper Understanding of Camouflaged Object Detection
With the above understanding about camouflaged objects, we present the first triple-task learning framework to simultaneously localize, segment, and rank camouflaged objects, indicating the conspicuousness level of camouflage.
Deep Non-rigid Structure-from-Motion: A Sequence-to-Sequence Translation Perspective
In this paper, we propose to model deep NRSfM from a sequence-to-sequence translation perspective, where the input 2D frame sequence is taken as a whole to reconstruct the deforming 3D non-rigid shape sequence.

VRNet: Learning the Rectified Virtual Corresponding Points for 3D Point Cloud Registration
3D point cloud registration is fragile to outliers, which are labeled as the points without corresponding points.
A Representation Separation Perspective to Correspondences-free Unsupervised 3D Point Cloud Registration
Existing correspondences-free methods generally learn the holistic representation of the entire point cloud, which is fragile for partial and noisy point clouds.
Efficient Multi-View Stereo by Iterative Dynamic Cost Volume
Specifically, a lightweight 3D CNN is utilized to generate the coarsest initial depth map which is essential to launch the GRU and guarantee a fast convergence.
MUNet: Motion Uncertainty-aware Semi-supervised Video Object Segmentation
The task of semi-supervised video object segmentation (VOS) has been greatly advanced and state-of-the-art performance has been made by dense matching-based methods.
A General Divergence Modeling Strategy for Salient Object Detection
Given multiple saliency annotations, we introduce a general divergence modeling strategy via random sampling, and apply our strategy to an ensemble based framework and three latent variable model based solutions to explore the subjective nature of saliency.
Dense Uncertainty Estimation via an Ensemble-based Conditional Latent Variable Model
Uncertainty estimation has been extensively studied in recent literature, which can usually be classified as aleatoric uncertainty and epistemic uncertainty.
End-to-end Learning the Partial Permutation Matrix for Robust 3D Point Cloud Registration
Even though considerable progress has been made in deep learning-based 3D point cloud processing, how to obtain accurate correspondences for robust registration remains a major challenge because existing hard assignment methods cannot deal with outliers naturally.
Dense Uncertainty Estimation
Deep neural networks can be roughly divided into deterministic neural networks and stochastic neural networks. The former is usually trained to achieve a mapping from input space to output space via maximum likelihood estimation for the weights, which leads to deterministic predictions during testing.
RGB-D Saliency Detection via Cascaded Mutual Information Minimization
In this paper, we introduce a novel multi-stage cascaded learning framework via mutual information minimization to "explicitly" model the multi-modal information between RGB image and depth data.

PR-RRN: Pairwise-Regularized Residual-Recursive Networks for Non-rigid Structure-from-Motion
As NRSfM is a highly under-constrained problem, we propose two new pairwise regularization to further regularize the reconstruction.
SUNet: Symmetric Undistortion Network for Rolling Shutter Correction
The vast majority of modern consumer-grade cameras employ a rolling shutter mechanism, leading to image distortions if the camera moves during image acquisition.
Complementary Patch for Weakly Supervised Semantic Segmentation
Therefore, a CAM with more information related to object seeds can be obtained by narrowing down the gap between the sum of CAMs generated by the CP Pair and the original CAM.

Exploring Depth Contribution for Camouflaged Object Detection
In this paper, we study the depth contribution for camouflaged object detection, where the depth maps are generated with existing monocular depth estimation (MDE) methods.
 Generative Adversarial Network
Generative Adversarial Network
 Monocular Depth Estimation
+5
Monocular Depth Estimation
+5
Generative Transformer for Accurate and Reliable Salient Object Detection
For the former, we apply transformer to a deterministic model, and explain that the effective structure modeling and global context modeling abilities lead to its superior performance compared with the CNN based frameworks.

CFNet: Cascade and Fused Cost Volume for Robust Stereo Matching
In this paper, we propose CFNet, a Cascade and Fused cost volume based network to improve the robustness of the stereo matching network.
Uncertainty-aware Joint Salient Object and Camouflaged Object Detection
Visual salient object detection (SOD) aims at finding the salient object(s) that attract human attention, while camouflaged object detection (COD) on the contrary intends to discover the camouflaged object(s) that hidden in the surrounding.
Deep Two-View Structure-from-Motion Revisited
Two-view structure-from-motion (SfM) is the cornerstone of 3D reconstruction and visual SLAM.
 Ranked #24 on
Monocular Depth Estimation
on KITTI Eigen split
Ranked #24 on
Monocular Depth Estimation
on KITTI Eigen split
Simultaneously Localize, Segment and Rank the Camouflaged Objects
With the above understanding about camouflaged objects, we present the first ranking based COD network (Rank-Net) to simultaneously localize, segment and rank camouflaged objects.

IAFA: Instance-aware Feature Aggregation for 3D Object Detection from a Single Image
3D object detection from a single image is an important task in Autonomous Driving (AD), where various approaches have been proposed.
 Ranked #19 on
Monocular 3D Object Detection
on KITTI Cars Moderate
Ranked #19 on
Monocular 3D Object Detection
on KITTI Cars Moderate

Inverting a Rolling Shutter Camera: Bring Rolling Shutter Images to High Framerate Global Shutter Video
In this paper, we propose to invert the above RS imaging mechanism, i. e., recovering a high framerate GS video from consecutive RS images to achieve RS temporal super-resolution (RSSR).
UASNet: Uncertainty Adaptive Sampling Network for Deep Stereo Matching
Extensive experiments show that the proposed method achieves the highest ground truth covering ratio compared with other cascade cost volume based stereo matching methods.
Neural Image Compression via Attentional Multi-Scale Back Projection and Frequency Decomposition
In recent years, neural image compression emerges as a rapidly developing topic in computer vision, where the state-of-the-art approaches now exhibit superior compression performance than their conventional counterparts.
Class Attention Network for Semantic Segmentation of Remote Sensing Images
In this paper, we proposed a novel class attention module and decomposition-fusion strategy to cope with imbalanced labels.
Uncertainty-Aware Deep Calibrated Salient Object Detection
Existing deep neural network based salient object detection (SOD) methods mainly focus on pursuing high network accuracy.
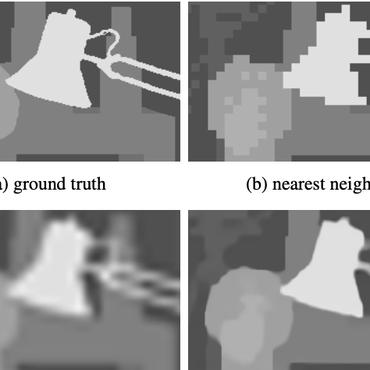
Depth Completion using Piecewise Planar Model
More specifically, we represent the desired depth map as a collection of 3D planar and the reconstruction problem is formulated as the optimization of planar parameters.
Efficient Depth Completion Using Learned Bases
The given sparse depth points are served as a data term to constrain the weighting process.
Displacement-Invariant Cost Computation for Efficient Stereo Matching
A common way to speed up the computation is to downsample the feature volume, but this loses high-frequency details.
Displacement-Invariant Matching Cost Learning for Accurate Optical Flow Estimation
Learning matching costs has been shown to be critical to the success of the state-of-the-art deep stereo matching methods, in which 3D convolutions are applied on a 4D feature volume to learn a 3D cost volume.
Hierarchical Neural Architecture Search for Deep Stereo Matching
To reduce the human efforts in neural network design, Neural Architecture Search (NAS) has been applied with remarkable success to various high-level vision tasks such as classification and semantic segmentation.
 Ranked #2 on
Stereo Disparity Estimation
on Scene Flow
Ranked #2 on
Stereo Disparity Estimation
on Scene Flow

Novel View Synthesis from only a 6-DoF Camera Pose by Two-stage Networks
That is, we synthesize the novel view from only a 6-DoF camera pose directly.
PRAFlow_RVC: Pyramid Recurrent All-Pairs Field Transforms for Optical Flow Estimation in Robust Vision Challenge 2020
Optical flow estimation is an important computer vision task, which aims at estimating the dense correspondences between two frames.
Uncertainty Inspired RGB-D Saliency Detection
Our framework includes two main models: 1) a generator model, which maps the input image and latent variable to stochastic saliency prediction, and 2) an inference model, which gradually updates the latent variable by sampling it from the true or approximate posterior distribution.
 Ranked #1 on
RGB-D Salient Object Detection
on LFSD
Ranked #1 on
RGB-D Salient Object Detection
on LFSD
 RGB-D Salient Object Detection
RGB-D Salient Object Detection
 RGB Salient Object Detection
+1
RGB Salient Object Detection
+1
PCW-Net: Pyramid Combination and Warping Cost Volume for Stereo Matching
First, we construct combination volumes on the upper levels of the pyramid and develop a cost volume fusion module to integrate them for initial disparity estimation.
Dense Non-Rigid Structure from Motion: A Manifold Viewpoint
Assuming that a deforming shape is composed of a union of local linear subspace and, span a global low-rank space over multiple frames enables us to efficiently model complex non-rigid deformations.

Relative Pose Estimation for Stereo Rolling Shutter Cameras
In this paper, we present a novel linear algorithm to estimate the 6 DoF relative pose from consecutive frames of stereo rolling shutter (RS) cameras.

Channel Attention based Iterative Residual Learning for Depth Map Super-Resolution
Second, we propose a new framework for real-world DSR, which consists of four modules : 1) An iterative residual learning module with deep supervision to learn effective high-frequency components of depth maps in a coarse-to-fine manner; 2) A channel attention strategy to enhance channels with abundant high-frequency components; 3) A multi-stage fusion module to effectively re-exploit the results in the coarse-to-fine process; and 4) A depth refinement module to improve the depth map by TGV regularization and input loss.
UC-Net: Uncertainty Inspired RGB-D Saliency Detection via Conditional Variational Autoencoders
In this paper, we propose the first framework (UCNet) to employ uncertainty for RGB-D saliency detection by learning from the data labeling process.
Ranked #4 on
RGB-D Salient Object Detection
on LFSD
Weakly-Supervised Salient Object Detection via Scribble Annotations
In this paper, we propose a weakly-supervised salient object detection model to learn saliency from such annotations.

Superpixel Soup: Monocular Dense 3D Reconstruction of a Complex Dynamic Scene
We assume that a dynamic scene can be approximated by numerous piecewise planar surfaces, where each planar surface enjoys its own rigid motion, and the global change in the scene between two frames is as-rigid-as-possible (ARAP).
Joint Stereo Video Deblurring, Scene Flow Estimation and Moving Object Segmentation
Under our model, these three tasks are naturally connected and expressed as the parameter estimation of 3D scene structure and camera motion (structure and motion for the dynamic scenes).
MVS^2: Deep Unsupervised Multi-view Stereo with Multi-View Symmetry
The success of existing deep-learning based multi-view stereo (MVS) approaches greatly depends on the availability of large-scale supervision in the form of dense depth maps.
IoU Loss for 2D/3D Object Detection
In 2D/3D object detection task, Intersection-over-Union (IoU) has been widely employed as an evaluation metric to evaluate the performance of different detectors in the testing stage.

Multi-scale Cross-form Pyramid Network for Stereo Matching
The network consists of three modules: Multi-Scale 2D local feature extraction module, Cross-form spatial pyramid module and Multi-Scale 3D Feature Matching and Fusion module.


MSDC-Net: Multi-Scale Dense and Contextual Networks for Automated Disparity Map for Stereo Matching
The multi-scale residual 3D convolution module learns the different scale geometry context from the cost volume which aggregated by the multi-scale fusion 2D convolution module.
Unsupervised Deep Epipolar Flow for Stationary or Dynamic Scenes
In this paper, we propose Deep Epipolar Flow, an unsupervised optical flow method which incorporates global geometric constraints into network learning.
Deep Stacked Hierarchical Multi-patch Network for Image Deblurring
depth, we propose a stacked version of our multi-patch model.
 Ranked #9 on
Deblurring
on RealBlur-R (trained on GoPro)
(SSIM (sRGB) metric)
Ranked #9 on
Deblurring
on RealBlur-R (trained on GoPro)
(SSIM (sRGB) metric)
High Frame Rate Video Reconstruction based on an Event Camera
Based on the abundant event data alongside a low frame rate, easily blurred images, we propose a simple yet effective approach to reconstruct high-quality and high frame rate sharp videos.

Ground Plane based Absolute Scale Estimation for Monocular Visual Odometry
Recovering the absolute metric scale from a monocular camera is a challenging but highly desirable problem for monocular camera-based systems.
Single Image Deblurring and Camera Motion Estimation with Depth Map
Camera shake during exposure is a major problem in hand-held photography, as it causes image blur that destroys details in the captured images.~In the real world, such blur is mainly caused by both the camera motion and the complex scene structure.~While considerable existing approaches have been proposed based on various assumptions regarding the scene structure or the camera motion, few existing methods could handle the real 6 DoF camera motion.~In this paper, we propose to jointly estimate the 6 DoF camera motion and remove the non-uniform blur caused by camera motion by exploiting their underlying geometric relationships, with a single blurry image and its depth map (either direct depth measurements, or a learned depth map) as input.~We formulate our joint deblurring and 6 DoF camera motion estimation as an energy minimization problem which is solved in an alternative manner.
Dense Depth Estimation of a Complex Dynamic Scene without Explicit 3D Motion Estimation
Given per-pixel optical flow correspondences between two consecutive frames and, the sparse depth prior for the reference frame, we show that, we can effectively recover the dense depth map for the successive frames without solving for 3D motion parameters.
ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving
Specifically, we first segment each car with a pre-trained Mask R-CNN, and then regress towards its 3D pose and shape based on a deformable 3D car model with or without using semantic keypoints.

Phase-only Image Based Kernel Estimation for Single-image Blind Deblurring
The image blurring process is generally modelled as the convolution of a blur kernel with a latent image.
Bringing a Blurry Frame Alive at High Frame-Rate with an Event Camera
In this paper, we propose a simple and effective approach, the \textbf{Event-based Double Integral (EDI)} model, to reconstruct a high frame-rate, sharp video from a single blurry frame and its event data.
Stochastic Attraction-Repulsion Embedding for Large Scale Image Localization
This paper tackles the problem of large-scale image-based localization (IBL) where the spatial location of a query image is determined by finding out the most similar reference images in a large database.
Stereo Computation for a Single Mixture Image
This paper proposes an original problem of \emph{stereo computation from a single mixture image}-- a challenging problem that had not been researched before.
Deeply Supervised Depth Map Super-Resolution as Novel View Synthesis
However, there still exist two major issues with these DCNN based depth map super-resolution methods that hinder the performance: i) The low-resolution depth maps either need to be up-sampled before feeding into the network or substantial deconvolution has to be used; and ii) The supervision (high-resolution depth maps) is only applied at the end of the network, thus it is difficult to handle large up-sampling factors, such as $\times 8, \times 16$.

3D Geometry-Aware Semantic Labeling of Outdoor Street Scenes
This paper is concerned with the problem of how to better exploit 3D geometric information for dense semantic image labeling.
Open-World Stereo Video Matching with Deep RNN
Deep Learning based stereo matching methods have shown great successes and achieved top scores across different benchmarks.
Occluded Joints Recovery in 3D Human Pose Estimation based on Distance Matrix
In this paper, we propose to address the problem of single image 3D human pose estimation with occluded measurements by exploiting the Euclidean distance matrix (EDM).
Deep Unsupervised Saliency Detection: A Multiple Noisy Labeling Perspective
Such supervision, while labor-intensive and not always possible, tends to hinder the generalization ability of the learned models.

Scalable Dense Non-rigid Structure-from-Motion: A Grassmannian Perspective
To address these issues, in this paper, we propose a new approach for dense NRSfM by modeling the problem on a Grassmann manifold.
Depth Map Completion by Jointly Exploiting Blurry Color Images and Sparse Depth Maps
In this paper, we propose to tackle the problem of depth map completion by jointly exploiting the blurry color image sequences and the sparse depth map measurements, and present an energy minimization based formulation to simultaneously complete the depth maps, estimate the scene flow and deblur the color images.
Efficient Global 2D-3D Matching for Camera Localization in a Large-Scale 3D Map
In this paper, we introduce a global method which harnesses global contextual information exhibited both within the query image and among all the 3D points in the map.
Self-Supervised Learning for Stereo Matching with Self-Improving Ability
Exiting deep-learning based dense stereo matching methods often rely on ground-truth disparity maps as the training signals, which are however not always available in many situations.
Deep Edge-Aware Saliency Detection
There has been profound progress in visual saliency thanks to the deep learning architectures, however, there still exist three major challenges that hinder the detection performance for scenes with complex compositions, multiple salient objects, and salient objects of diverse scales.
Monocular Dense 3D Reconstruction of a Complex Dynamic Scene from Two Perspective Frames
This paper proposes a new approach for monocular dense 3D reconstruction of a complex dynamic scene from two perspective frames.
Monocular Depth Estimation with Hierarchical Fusion of Dilated CNNs and Soft-Weighted-Sum Inference
Extensive experiments on the NYU Depth V2 and KITTI datasets show the superiority of our method compared with current state-of-the-art methods.
"Maximizing rigidity" revisited: a convex programming approach for generic 3D shape reconstruction from multiple perspective views
Rigid structure-from-motion (RSfM) and non-rigid structure-from-motion (NRSfM) have long been treated in the literature as separate (different) problems.

Pixel-variant Local Homography for Fisheye Stereo Rectification Minimizing Resampling Distortion
First, we prove that there indeed exist enough degrees of freedom to apply pixel-wise local homography for stereo rectification.
Dense Non-rigid Structure-from-Motion Made Easy - A Spatial-Temporal Smoothness based Solution
Second, we propose to exploit the spatial smoothness by resorting to the Laplacian of the 3D non-rigid shape.
Integrated Deep and Shallow Networks for Salient Object Detection
Then the results from deep FCNN and RBD are concatenated to feed into a shallow network to map the concatenated feature maps to saliency maps.
Spatial-Temporal Union of Subspaces for Multi-body Non-rigid Structure-from-Motion
This spatio-temporal representation not only provides competitive 3D reconstruction but also outputs robust segmentation of multiple non-rigid objects.
Single image depth estimation by dilated deep residual convolutional neural network and soft-weight-sum inference
This paper proposes a new residual convolutional neural network (CNN) architecture for single image depth estimation.
Skeleton based action recognition using translation-scale invariant image mapping and multi-scale deep cnn
Especially on the largest and challenge NTU RGB+D, UTD-MHAD, and MSRC-12 dataset, our method outperforms other methods by a large margion, which proves the efficacy of the proposed method.
 Ranked #80 on
Skeleton Based Action Recognition
on NTU RGB+D
Ranked #80 on
Skeleton Based Action Recognition
on NTU RGB+D

Skeleton Boxes: Solving skeleton based action detection with a single deep convolutional neural network
However, due to the difficulty in representing the 3D skeleton video and the lack of training data, action detection from streaming 3D skeleton video still lags far behind its recognition counterpart and image based object detection.

Simultaneous Stereo Video Deblurring and Scene Flow Estimation
Unlike the existing approach [31] which used a pre-computed scene flow, we propose a single framework to jointly estimate the scene flow and deblur the image, where the motion cues from scene flow estimation and blur information could reinforce each other, and produce superior results than the conventional scene flow estimation or stereo deblurring methods.
Multi-body Non-rigid Structure-from-Motion
Recent progress have extended SFM to the areas of {multi-body SFM} (where there are {multiple rigid} relative motions in the scene), as well as {non-rigid SFM} (where there is a single non-rigid, deformable object or scene).
Deep Depth Super-Resolution : Learning Depth Super-Resolution using Deep Convolutional Neural Network
In this paper, we bridge up the gap and extend the success of deep convolutional neural network to depth super-resolution.

Robust and Efficient Relative Pose with a Multi-camera System for Autonomous Vehicle in Highly Dynamic Environments
When the solver is used in combination with RANSAC, we are able to quickly prune unpromising hypotheses, significantly improve the chance of finding inliers.
Robust Optical Flow Estimation of Double-Layer Images under Transparency or Reflection
This paper deals with a challenging, frequently encountered, yet not properly investigated problem in two-frame optical flow estimation.
Rolling Shutter Camera Relative Pose: Generalized Epipolar Geometry
The vast majority of modern consumer-grade cameras employ a rolling shutter mechanism.
Depth and Surface Normal Estimation From Monocular Images Using Regression on Deep Features and Hierarchical CRFs
Predicting the depth (or surface normal) of a scene from single monocular color images is a challenging task.
