Search Results for author:
Found 13 papers, 7 papers with code
The Feasibility of Constrained Reinforcement Learning Algorithms: A Tutorial Study
We demonstrate our feasibility theory by visualizing different feasible regions under both MPC and RL policies in an emergency braking control task.
Policy Bifurcation in Safe Reinforcement Learning
Safe reinforcement learning (RL) offers advanced solutions to constrained optimal control problems.
SAM-DiffSR: Structure-Modulated Diffusion Model for Image Super-Resolution
In this paper, we propose the SAM-DiffSR model, which can utilize the fine-grained structure information from SAM in the process of sampling noise to improve the image quality without additional computational cost during inference.

DenseMamba: State Space Models with Dense Hidden Connection for Efficient Large Language Models
Large language models (LLMs) face a daunting challenge due to the excessive computational and memory requirements of the commonly used Transformer architecture.
On the Stability of Datatic Control Systems
This information restricts the time derivative of any unknown state to the intersection of a set of closed balls.
Safe Offline Reinforcement Learning with Feasibility-Guided Diffusion Model
Interestingly, we discover that via reachability analysis of safe-control theory, the hard safety constraint can be equivalently translated to identifying the largest feasible region given the offline dataset.
Safe Reinforcement Learning with Dual Robustness
To address this issue, we propose a systematic framework to unify safe RL and robust RL, including problem formulation, iteration scheme, convergence analysis and practical algorithm design.
S3IM: Stochastic Structural SIMilarity and Its Unreasonable Effectiveness for Neural Fields
Recently, Neural Radiance Field (NeRF) has shown great success in rendering novel-view images of a given scene by learning an implicit representation with only posed RGB images.

Feasible Policy Iteration
To address this challenge, we propose an indirect safe RL framework called feasible policy iteration, which guarantees that the feasible region monotonically expands and converges to the maximum one, and the state-value function monotonically improves and converges to the optimal one.
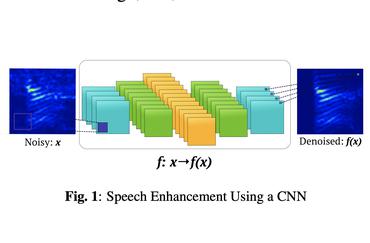
McNet: Fuse Multiple Cues for Multichannel Speech Enhancement
In multichannel speech enhancement, both spectral and spatial information are vital for discriminating between speech and noise.
Safe Model-Based Reinforcement Learning with an Uncertainty-Aware Reachability Certificate
Furthermore, we build a safe RL framework to resolve constraints required by the DRC and its corresponding shield policy.
 Model-based Reinforcement Learning
reinforcement-learning
+2
Model-based Reinforcement Learning
reinforcement-learning
+2
Joint LED Selection and Precoding Optimization for Multiple-User Multiple-Cell VLC Systems
First, a MU-MC-VLC system model is established, and then a sum-rate maximization problem under dimming level and illumination uniformity constraints is formulated.
Steadily Learn to Drive with Virtual Memory
Reinforcement learning has shown great potential in developing high-level autonomous driving.

