HEV-I (Honda Egocentric View-Intersection Dataset)
Introduced by Yao et al. in Egocentric Vision-based Future Vehicle Localization for Intelligent Driving Assistance Systems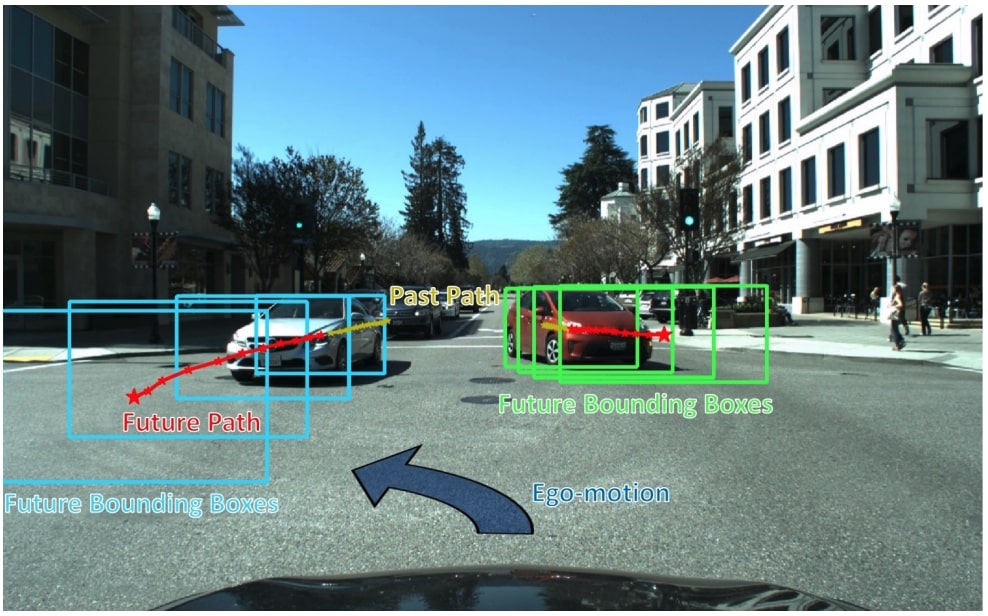
Honda Egocentric View-Intersection Dataset (HEV-I) is introduced to enable research on traffic participants interaction modelling, future object localization, as well as learning driver action in challenging driving scenarios. The dataset includes 230 video clips of real human driving in different intersections from the San Francisco Bay Area, collected using an instrumented vehicle equipped with different sensors including cameras, GPS/IMU, and vehicle states signals.

Papers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders
No data loaders found. You can
submit your data loader here.
No data loaders found. You can
submit your data loader here.

