KITTI-trajectory-prediction
Introduced by Marchetti et al. in MANTRA: Memory Augmented Networks for Multiple Trajectory Prediction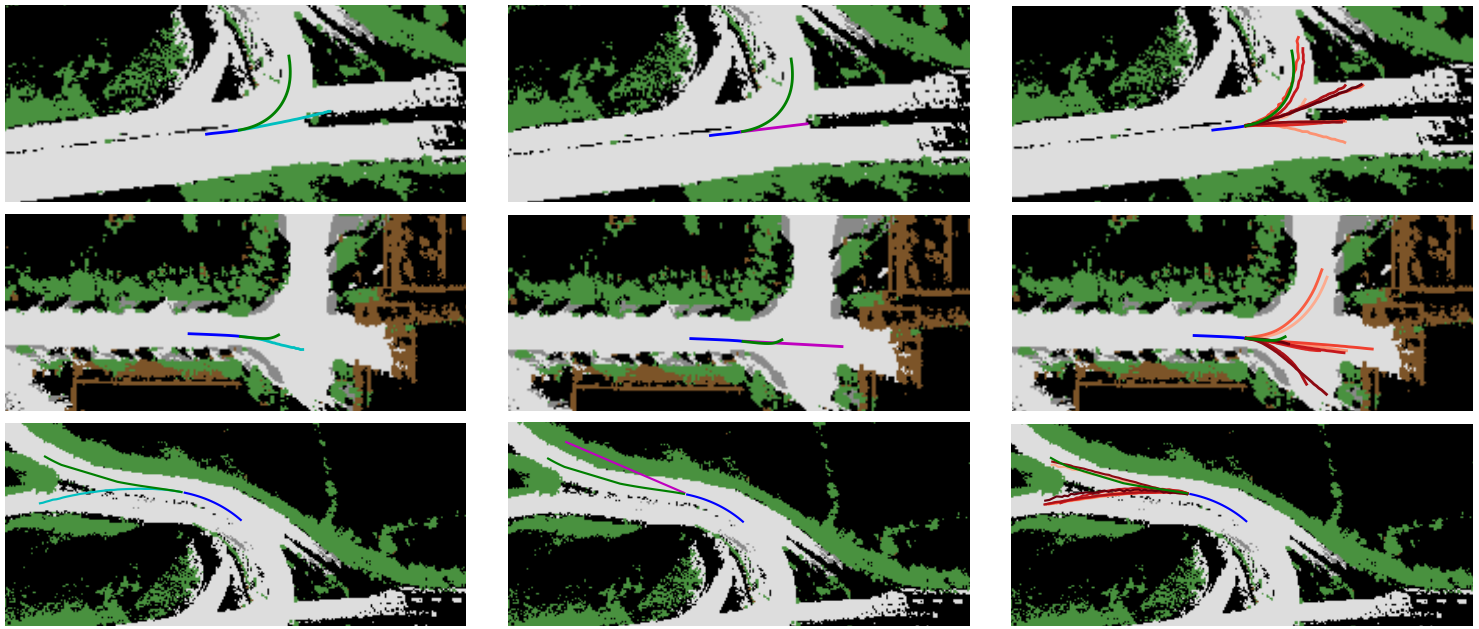
KITTI is a well established dataset in the computer vision community. It has often been used for trajectory prediction despite not having a well defined split, generating non comparable baselines in different works. This dataset aims at bridging this gap and proposes a well defined split of the KITTI data. Samples are collected as 6 seconds chunks (2seconds for past and 4 for future) in a sliding window fashion from all trajectories in the dataset, including the egovehicle. There are a total of 8613 top-view trajectories for training and 2907 for testing. Since top-view maps are not provided by KITTI, semantic labels of static categories obtained with DeepLab-v3+ from all frames are projected in a common top-view map using the Velodyne 3D point cloud and IMU. The resulting maps have a spatial resolution of 0.5 meters and are provided along with the trajectories.
Benchmarks
| Trend | Task | Dataset Variant | Best Model | Paper | Code |
|---|---|---|---|---|---|

|
KITTI-trajectory-prediction
|
SynthTraj
|
Papers
| Paper | Code | Results | Date | Stars |
|---|


