L3DAS22
Introduced by Guizzo et al. in L3DAS22 Challenge: Learning 3D Audio Sources in a Real Office Environment
L3DAS22: MACHINE LEARNING FOR 3D AUDIO SIGNAL PROCESSING
This dataset supports the L3DAS22 IEEE ICASSP Gand Challenge. The challenge is supported by a Python API that facilitates the dataset download and preprocessing, the training and evaluation of the baseline models and the results submission.
Scope of the Challenge
The L3DAS22 Challenge aims at encouraging and fostering research on machine learning for 3D audio signal processing. 3D audio is gaining increasing interest in the machine learning community in recent years. The range of applications is incredibly wide, extending from virtual and real conferencing to autonomous driving, surveillance and many more. In these contexts, a fundamental procedure is to properly identify the nature of events present in a soundscape, their spatial position and eventually remove unwanted noises that can interfere with the useful signal. To this end, L3DAS22 Challenge presents two tasks: 3D Speech Enhancement and 3D Sound Event Localization and Detection, both relying on first-order Ambisonics recordings in reverberant office environments. Each task involves 2 separate tracks: 1-mic and 2-mic recordings, respectively containing sounds acquired by one 1st order Ambisonics microphone and by an array of two ones. The use of two Ambisonics microphones represents one of the main novelties of the L3DAS22 Challenge. We expect higher accuracy/reconstruction quality when taking advantage of the dual spatial perspective of the two microphones. Moreover, we are very interested in identifying other possible advantages of this configuration over standard Ambisonics formats. Interactive demos of our baseline models are available on Replicate. Top 5 ranked teams can submit a regular paper according to the ICASSP guidelines. Prizes will be awarded to the challenge winners thanks to the support of Kuaishou Technology.
Tasks
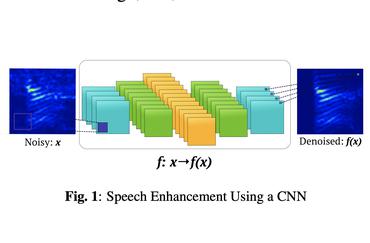
Tasks The tasks we propose are: * 3D Speech Enhancement The objective of this task is the enhancement of speech signals immersed in the spatial sound field of a reverberant office environment. Here the models are expected to extract the monophonic voice signal from the 3D mixture containing various background noises. The evaluation metric for this task is a combination of short-time objective intelligibility (STOI) and word error rate (WER). * 3D Sound Event Localization and Detection The aim of this task is to detect the temporal activities of a known set of sound event classes and, in particular, to further locate them in the space. Here the models must predict a list of the active sound events and their respective location at regular intervals of 100 milliseconds. Performance on this task is evaluated according to the location-sensitive detection error, which joins the localization and detection error metrics.
Dataset Info
The L3DAS22 datasets contain multiple-source and multiple-perspective B-format Ambisonics audio recordings. We sampled the acoustic field of a large office room, placing two first-order Ambisonics microphones in the center of the room and moving a speaker reproducing the analytic signal in 252 fixed spatial positions. Relying on the collected Ambisonics impulse responses (IRs), we augmented existing clean monophonic datasets to obtain synthetic tridimensional sound sources by convolving the original sounds with our IRs. We extracted speech signals from the Librispeech dataset and office-like background noises from the FSD50K dataset. We aimed at creating plausible and variegate 3D scenarios to reflect possible real-life situations in which sound and disparate types of background noises coexist in the same 3D reverberant environment. We provide normalized raw waveforms as predictors data and the target data varies according to the task.
The dataset is divided in two main sections, respectively dedicated to the challenge tasks.
The first section is optimized for 3D Speech Enhancement and contains more than 60000 virtual 3D audio environments with a duration up to 12 seconds. In each sample, a spoken voice is always present alongside with other office-like background noises. As target data for this section we provide the clean monophonic voice signals. For each subset we also provide a csv file, where we annotated the coordinates and spatial distance of the IR convolved with the target voice signals for each datapoint. This may be useful to estimate the delay caused by the virtual time-of-flight of the target voice signal and to perform a sample-level alignment of the input and ground truth signals.
The other sections, instead, is dedicated to the 3D Sound Event Localization and Detection task and contains 900 30-seconds-long audio files. Each data point contains a simulated 3D office audio environment in which up to 3 simultaneous acoustic events may be active at the same time. In this section, the samples are not forced to contain a spoken voice. As target data for this section we provide a list of the onset and offset time stamps, the typology class, and the spatial coordinates of each individual sound event present in the data-points.
We split both dataset sections into a training set and a development set, paying attention to create similar distributions. The train set of the SE section is divided in two partitions: train360 and train100, and contain speech samples extracted from the correspondent partitions of Librispeech (only the sample) up to 12 seconds. The train360 is split in 2 zip files for a more convenient download. All sets of the SELD section are divided in: OV1, OV2, OV3. These partitions refer to the maximum amount of possible overlapping sounds, which are 1, 2 or 3, respectively.
L3DAS22 Challenge Supporting API
The gitHub supporting API is aimed at downloading the dataset, pre-processing the sound files and the metadata, training and evaluating the baseline models and validating the final results. We provide easy-to-use instruction to produce the results included in our paper. Moreover, we extensively commented our code for easy customization. For further information please refer to the challenge website and to the challenge documentation.
Papers
| Paper | Code | Results | Date | Stars |
|---|