SMOT (Single sequence-Multi Objects Training)
Introduced by Park et al. in Neural Object Learning for 6D Pose Estimation Using a Few Cluttered Images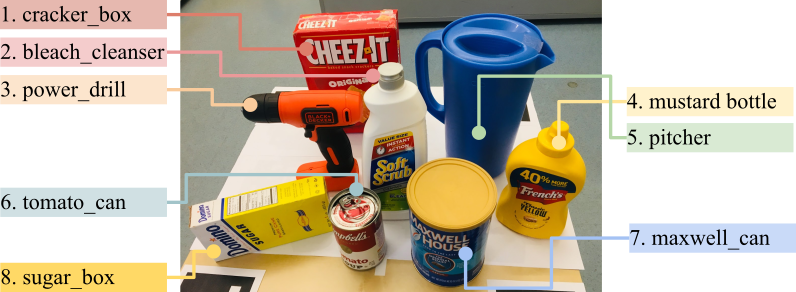
The SMOT dataset, Single sequence-Multi Objects Training, is collected to represent a practical scenario of collecting training images of new objects in the real world, i.e. a mobile robot with an RGB-D camera collects a sequence of frames while driving around a table to learning multiple objects and tries to recognize objects in different locations.
Source: SMOTPapers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders
No data loaders found. You can
submit your data loader here.
No data loaders found. You can
submit your data loader here.


