 Point Cloud Models
Point Cloud Models
Panoptic-PolarNet
Introduced by Zhou et al. in Panoptic-PolarNet: Proposal-free LiDAR Point Cloud Panoptic SegmentationPanoptic-PolarNet is a point cloud segmentation framework for LiDAR point clouds. It learns both semantic segmentation and class-agnostic instance clustering in a single inference network using a polar Bird's Eye View (BEV) representation, enabling the authors to circumvent the issue of occlusion among instances in urban street scenes. We first encode the raw point cloud data with $K$ features into a fixed-size representation on the polar BEV map. Next, we use a single backbone encoder-decoder network to generate semantic prediction, center heatmap and offset regression. Finally, we merge these outputs via a voting-based fusion to yield the panoptic segmentation result.
Source: Panoptic-PolarNet: Proposal-free LiDAR Point Cloud Panoptic Segmentation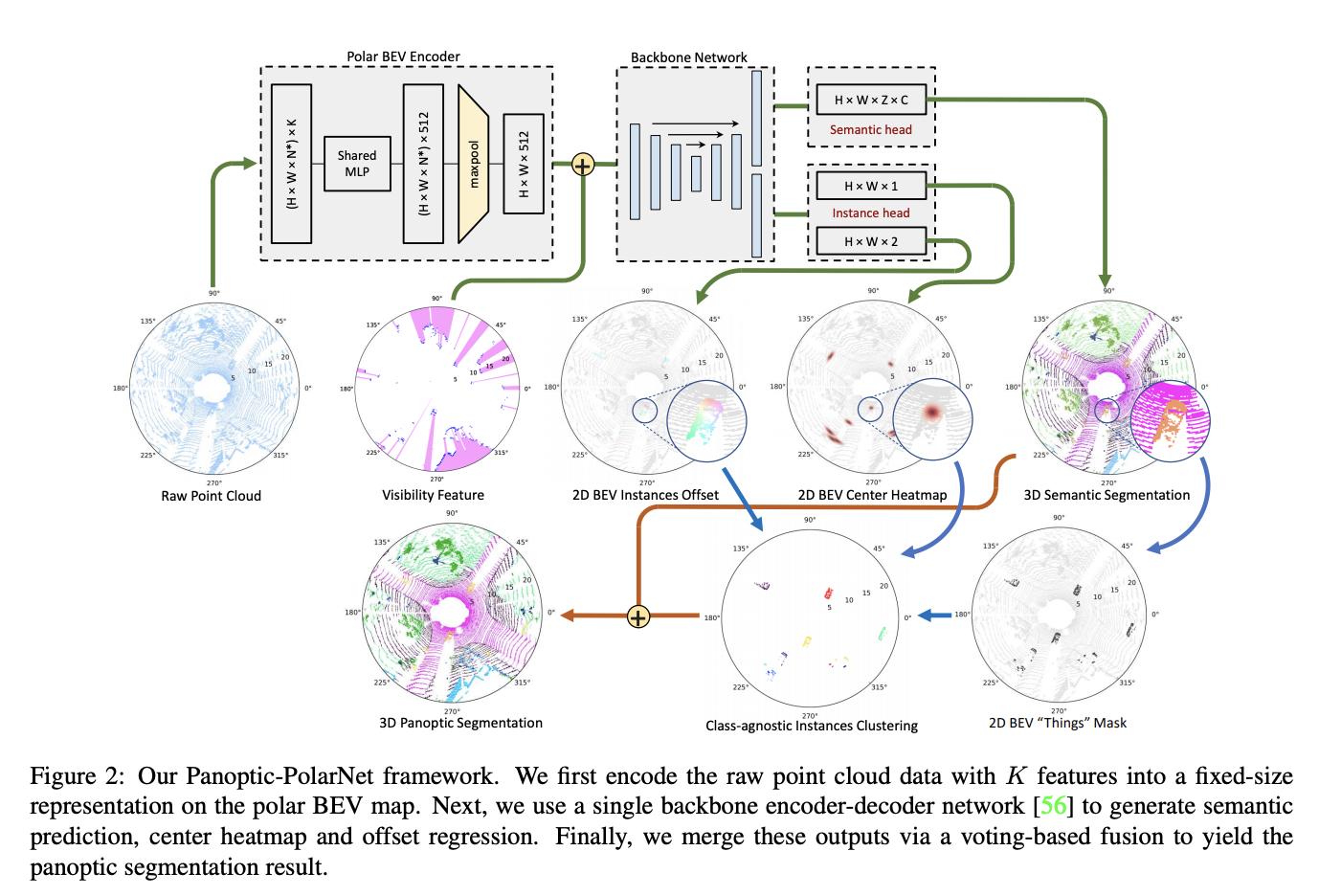
Papers
| Paper | Code | Results | Date | Stars |
|---|
Tasks
| Task | Papers | Share |
|---|---|---|
| Clustering | 1 | 25.00% |
| Instance Segmentation | 1 | 25.00% |
| Panoptic Segmentation | 1 | 25.00% |
| Semantic Segmentation | 1 | 25.00% |
Usage Over Time
Components
| Component | Type |
|
|---|---|---|
| 🤖 No Components Found | You can add them if they exist; e.g. Mask R-CNN uses RoIAlign |
