 3D Object Detection Models
3D Object Detection Models
Point-GNN
Introduced by Shi et al. in Point-GNN: Graph Neural Network for 3D Object Detection in a Point CloudPoint-GNN is a graph neural network for detecting objects from a LiDAR point cloud. It predicts the category and shape of the object that each vertex in the graph belongs to. In Point-GNN, there is an auto-registration mechanism to reduce translation variance, as well as a box merging and scoring operation to combine detections from multiple vertices accurately.
Source: Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud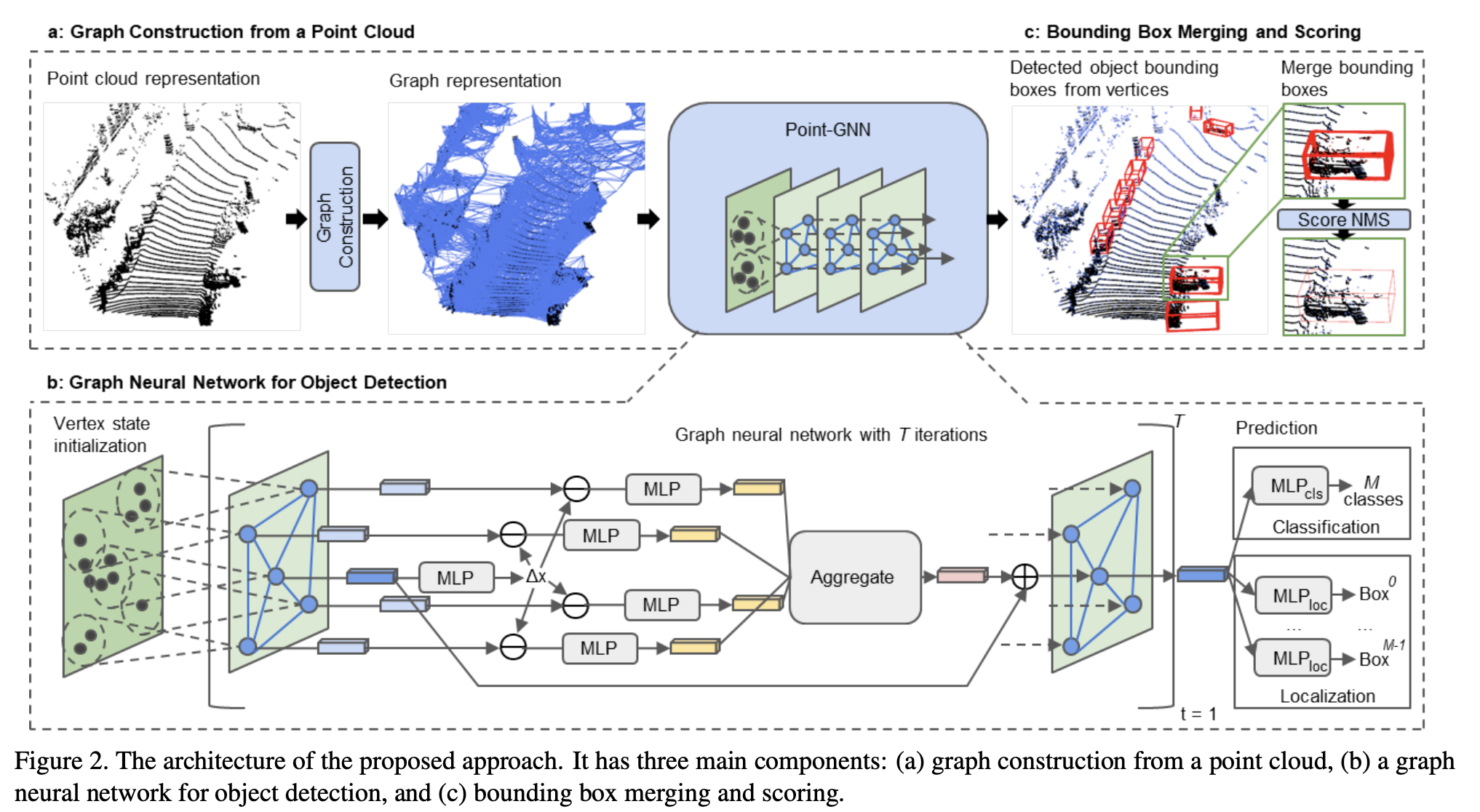
Papers
| Paper | Code | Results | Date | Stars |
|---|
Usage Over Time
Components
| Component | Type |
|
|---|---|---|
| 🤖 No Components Found | You can add them if they exist; e.g. Mask R-CNN uses RoIAlign |

