A Robust Loss for Point Cloud Registration
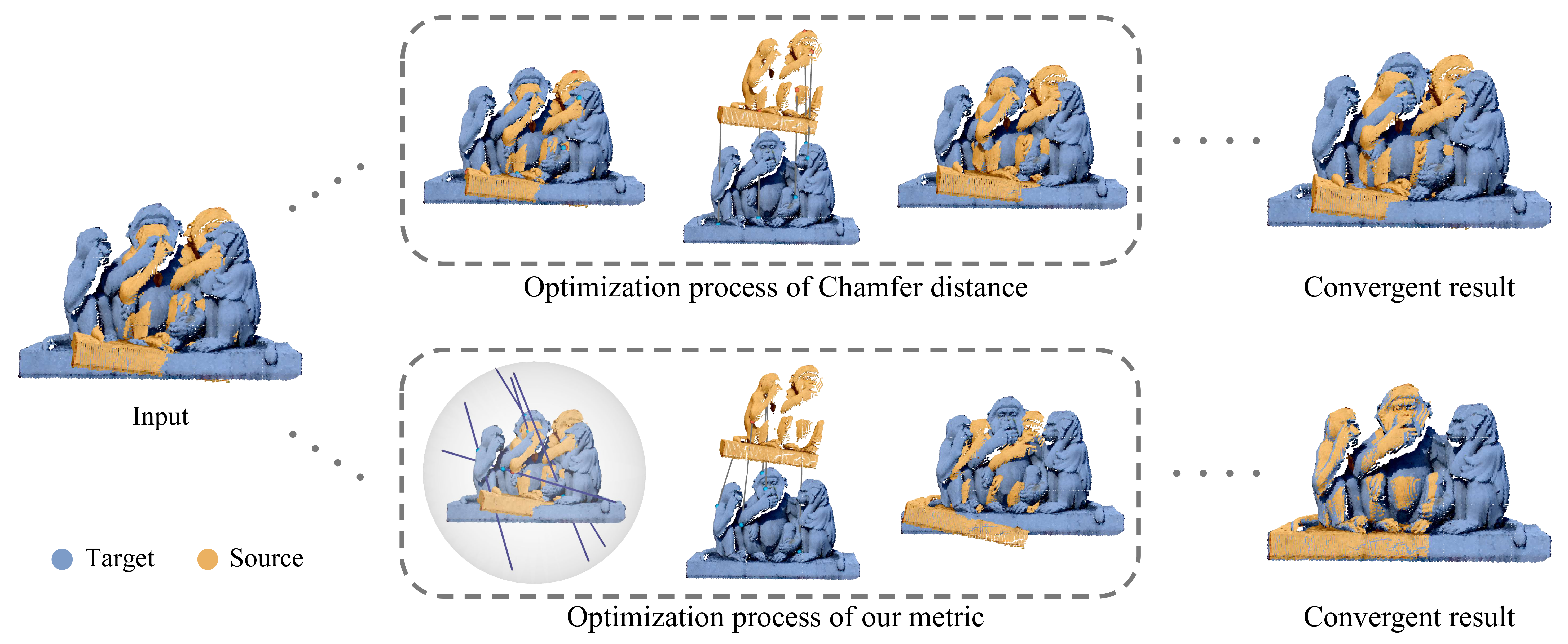
The performance of surface registration relies heavily on the metric used for the alignment error between the source and target shapes. Traditionally, such a metric is based on the point-to-point or point-to-plane distance from the points on the source surface to their closest points on the target surface, which is susceptible to failure due to instability of the closest-point correspondence. In this paper, we propose a novel metric based on the intersection points between the two shapes and a random straight line, which does not assume a specific correspondence. We verify the effectiveness of this metric by extensive experiments, including its direct optimization for a single registration problem as well as unsupervised learning for a set of registration problems. The results demonstrate that the algorithms utilizing our proposed metric outperforms the state-of-the-art optimization-based and unsupervised learning-based methods.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract

 3DMatch
3DMatch
