A Unified Framework for Domain Adaptive Pose Estimation
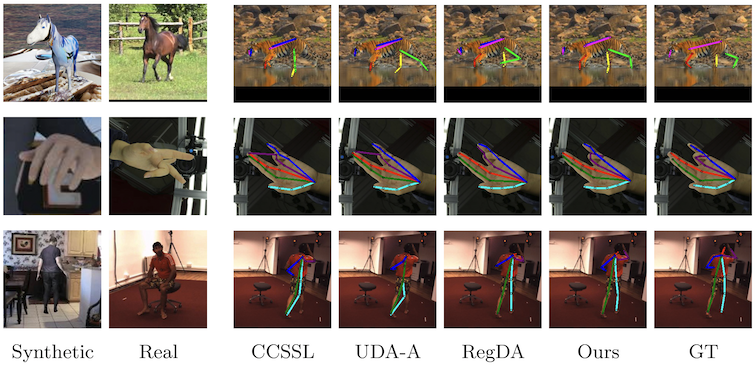
While pose estimation is an important computer vision task, it requires expensive annotation and suffers from domain shift. In this paper, we investigate the problem of domain adaptive 2D pose estimation that transfers knowledge learned on a synthetic source domain to a target domain without supervision. While several domain adaptive pose estimation models have been proposed recently, they are not generic but only focus on either human pose or animal pose estimation, and thus their effectiveness is somewhat limited to specific scenarios. In this work, we propose a unified framework that generalizes well on various domain adaptive pose estimation problems. We propose to align representations using both input-level and output-level cues (pixels and pose labels, respectively), which facilitates the knowledge transfer from the source domain to the unlabeled target domain. Our experiments show that our method achieves state-of-the-art performance under various domain shifts. Our method outperforms existing baselines on human pose estimation by up to 4.5 percent points (pp), hand pose estimation by up to 7.4 pp, and animal pose estimation by up to 4.8 pp for dogs and 3.3 pp for sheep. These results suggest that our method is able to mitigate domain shift on diverse tasks and even unseen domains and objects (e.g., trained on horse and tested on dog). Our code will be publicly available at: https://github.com/VisionLearningGroup/UDA_PoseEstimation.
PDF Abstract





 Human3.6M
Human3.6M
 LSP
LSP
 SURREAL
SURREAL
 FreiHAND
FreiHAND
 RHD
RHD
 Animal-Pose Dataset
Animal-Pose Dataset
