Active Visuo-Haptic Object Shape Completion
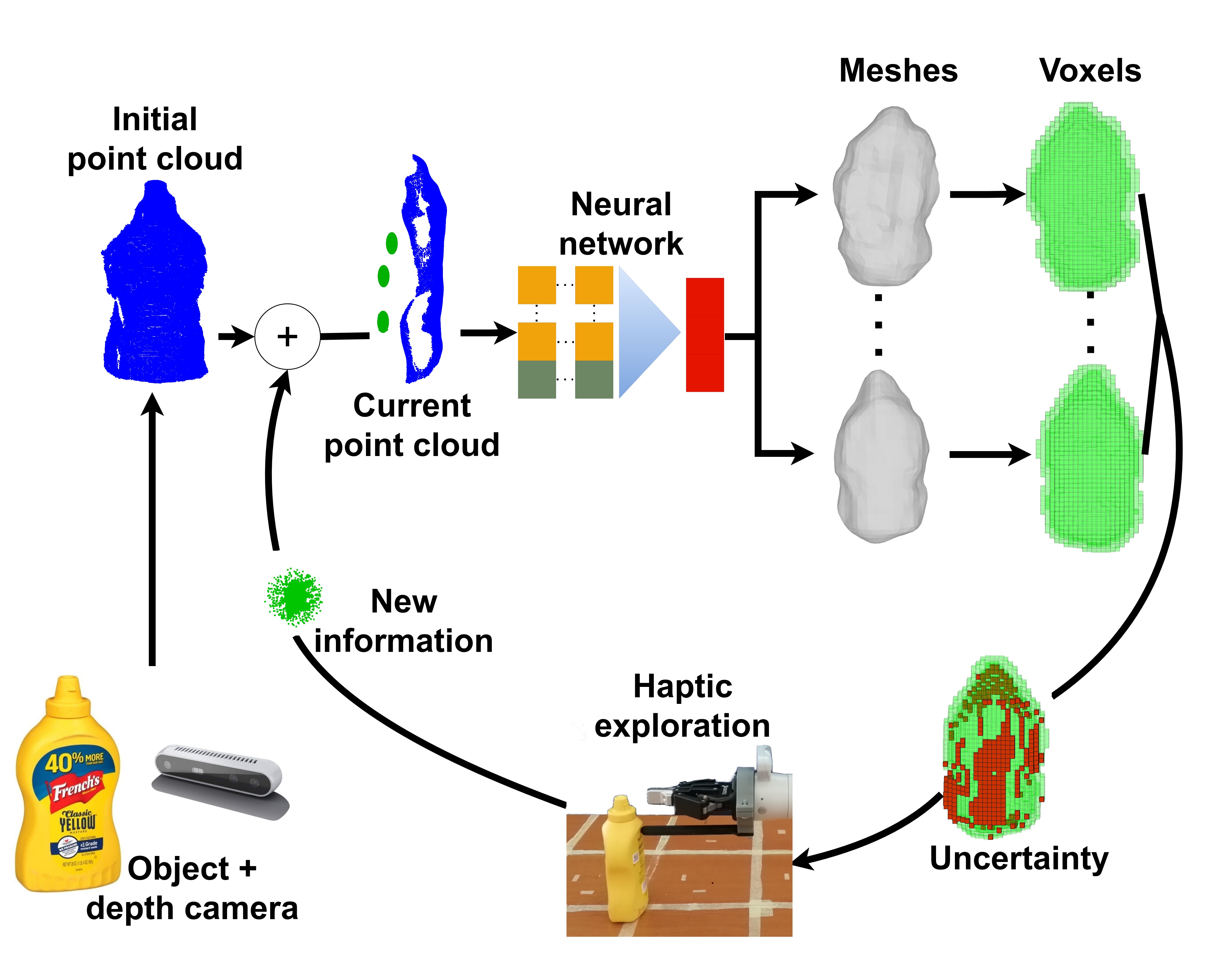
Recent advancements in object shape completion have enabled impressive object reconstructions using only visual input. However, due to self-occlusion, the reconstructions have high uncertainty in the occluded object parts, which negatively impacts the performance of downstream robotic tasks such as grasping. In this work, we propose an active visuo-haptic shape completion method called Act-VH that actively computes where to touch the objects based on the reconstruction uncertainty. Act-VH reconstructs objects from point clouds and calculates the reconstruction uncertainty using IGR, a recent state-of-the-art implicit surface deep neural network. We experimentally evaluate the reconstruction accuracy of Act-VH against five baselines in simulation and in the real world. We also propose a new simulation environment for this purpose. The results show that Act-VH outperforms all baselines and that an uncertainty-driven haptic exploration policy leads to higher reconstruction accuracy than a random policy and a policy driven by Gaussian Process Implicit Surfaces. As a final experiment, we evaluate Act-VH and the best reconstruction baseline on grasping 10 novel objects. The results show that Act-VH reaches a significantly higher grasp success rate than the baseline on all objects. Together, this work opens up the door for using active visuo-haptic shape completion in more complex cluttered scenes.
PDF Abstract

