BlitzNet: A Real-Time Deep Network for Scene Understanding
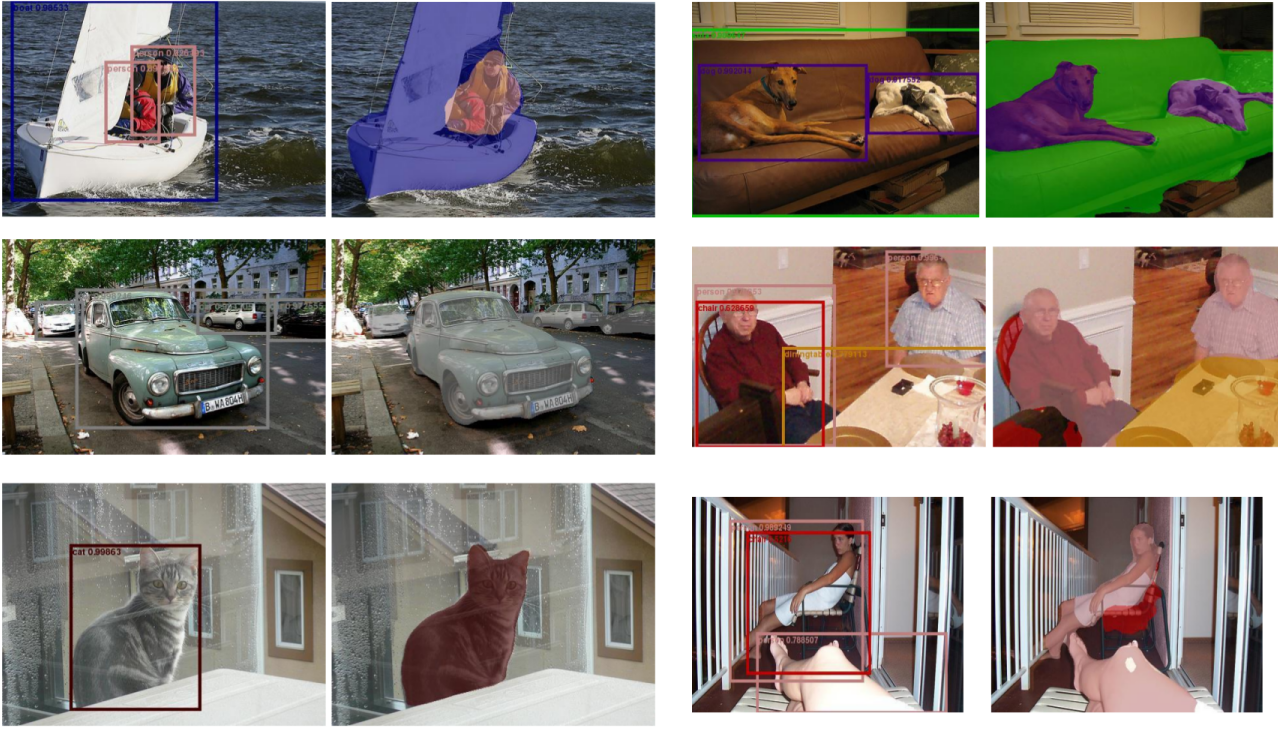
Real-time scene understanding has become crucial in many applications such as autonomous driving. In this paper, we propose a deep architecture, called BlitzNet, that jointly performs object detection and semantic segmentation in one forward pass, allowing real-time computations. Besides the computational gain of having a single network to perform several tasks, we show that object detection and semantic segmentation benefit from each other in terms of accuracy. Experimental results for VOC and COCO datasets show state-of-the-art performance for object detection and segmentation among real time systems.
PDF Abstract ICCV 2017 PDF ICCV 2017 Abstract






Datasets
 MS COCO
MS COCO
 ssd
ssd
 PASCAL VOC 2007
PASCAL VOC 2007
Results from the Paper

| Task | Dataset | Model | Metric Name | Metric Value | Global Rank | Benchmark |
|---|---|---|---|---|---|---|
| Real-Time Object Detection | PASCAL VOC 2007 | BlitzNet512 (s4) | MAP | 79.1% | # 3 | |
| FPS | 24 | # 2 | ||||
| Object Detection | PASCAL VOC 2007 | BlitzNet512 + seg (s8) | MAP | 81.5% | # 9 | |
| Real-Time Object Detection | PASCAL VOC 2007 | BlitzNet512 (s8) | MAP | 81.5% | # 1 | |
| FPS | 19.5 | # 3 |
Methods
No methods listed for this paper. Add
relevant methods here
