Characterizing the limits of human stability during motion: perturbative experiment validates a model-based approach for the Sit-to-Stand task
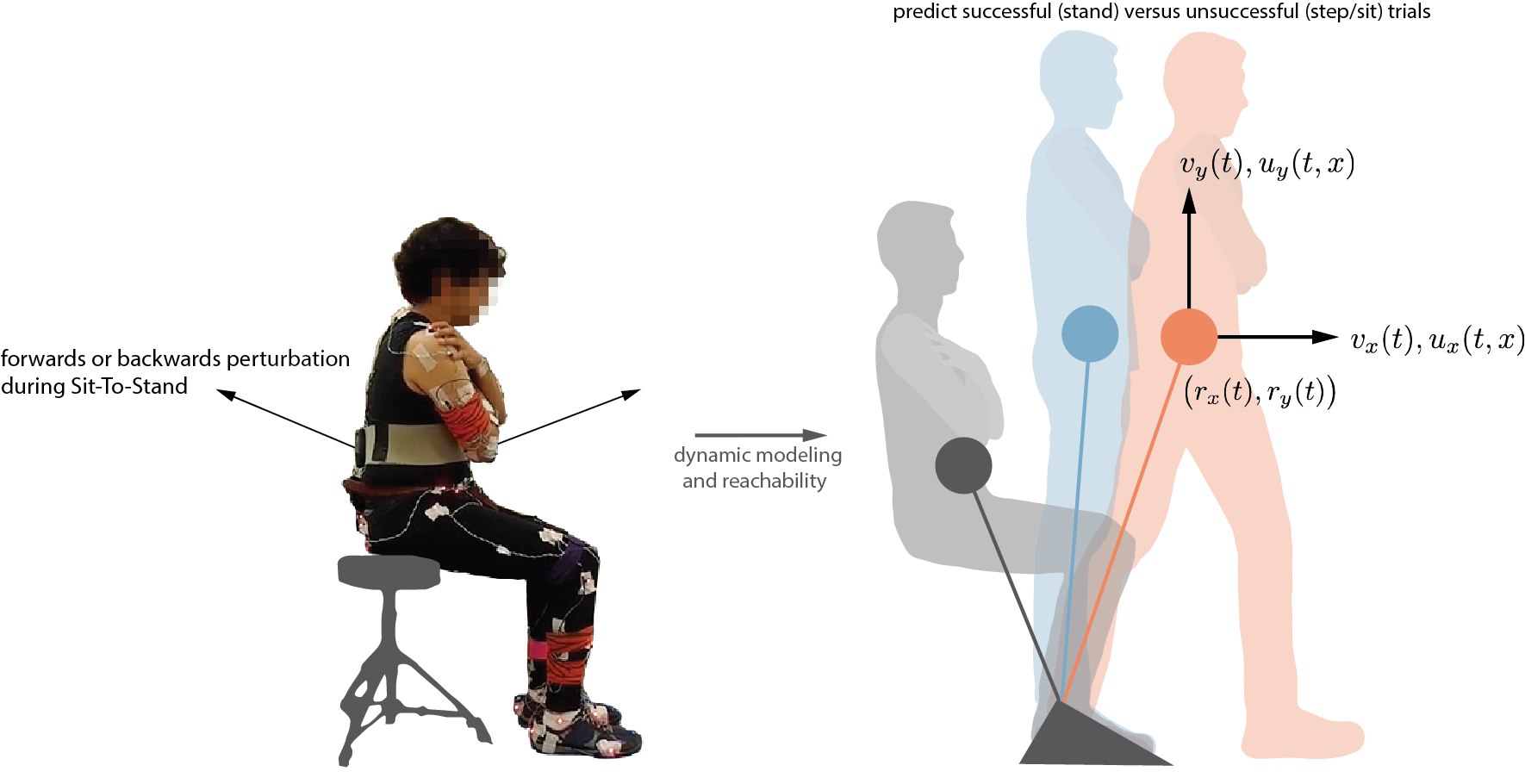
Falls affect a growing number of the population each year. Clinical methods to identify those at greatest risk for falls usually evaluate individuals while they perform specific motions such as balancing or Sit-to-Stand (STS). Unfortunately these techniques have been shown to have poor predictive power and are unable to identify the magnitude, direction, and timing of perturbations that can cause an individual to lose stability during motion. To address this limitation, the recently proposed Stability Basin (SB) aims to characterize the set of perturbations that will cause an individual to fall under a specific motor control strategy. The SB is defined as the set of configurations that do not lead to failure for an individual under their chosen control strategy. This paper presents a novel method to compute the SB and the first experimental validation of the SB with an 11-person perturbative STS experiment involving forwards or backwards pulls from a motor-driven cable. The individually-constructed SBs are used to identify when a trial fails, i.e., when an individual must switch control strategies (indicated by a step or sit) to recover from a perturbation. The constructed SBs correctly predict the outcome of trials where failure was observed with over 90% accuracy, and correctly predict the outcome of successful trials with over 95% accuracy. The SB was compared to three other methods and was found to estimate the stable region with over 45% more accuracy in all cases. This study demonstrates that SBs offer a novel model-based approach for quantifying stability during motion, which could be used in physical therapy for individuals at risk of falling.
PDF Abstract
