Context-Aware Streaming Perception in Dynamic Environments
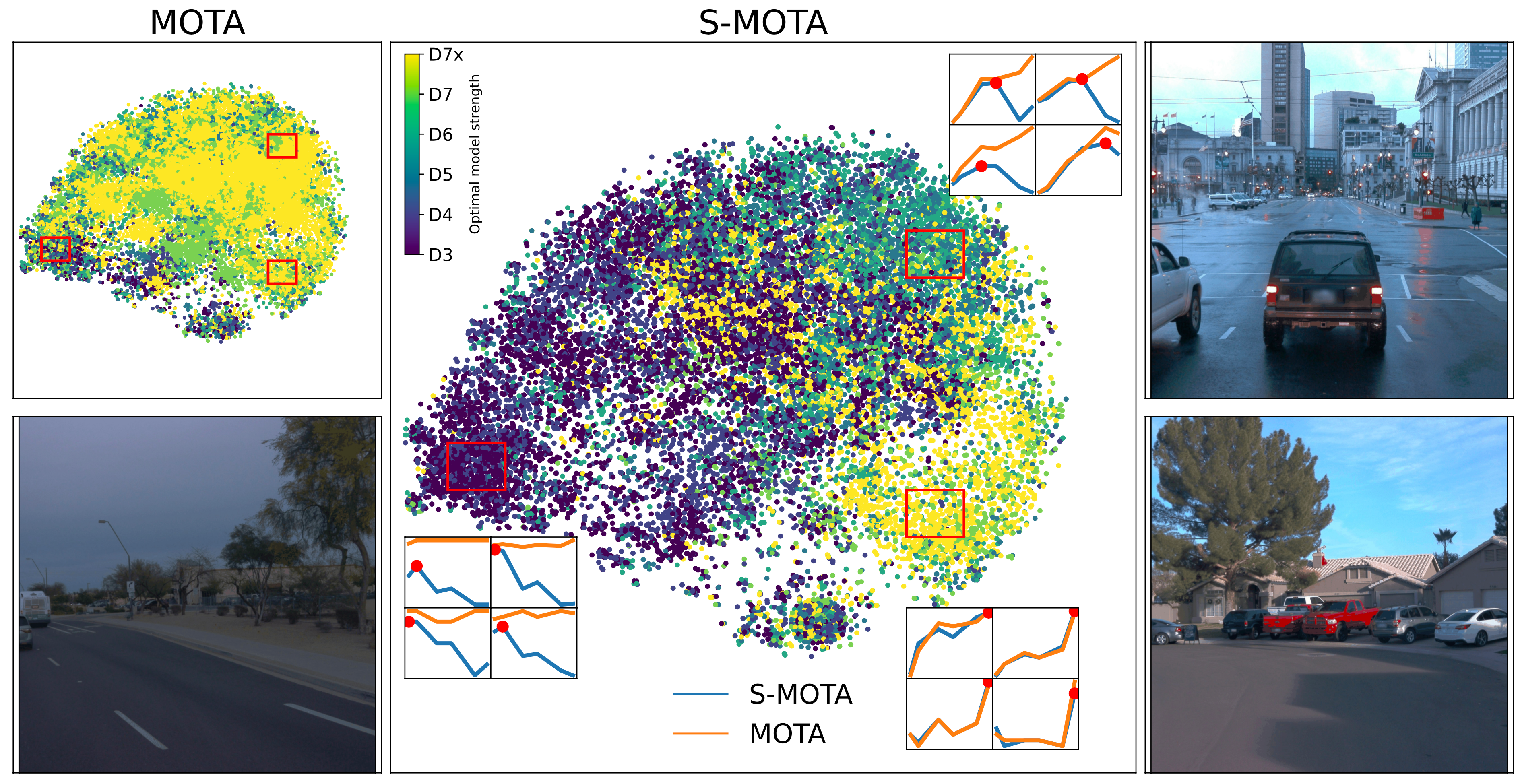
Efficient vision works maximize accuracy under a latency budget. These works evaluate accuracy offline, one image at a time. However, real-time vision applications like autonomous driving operate in streaming settings, where ground truth changes between inference start and finish. This results in a significant accuracy drop. Therefore, a recent work proposed to maximize accuracy in streaming settings on average. In this paper, we propose to maximize streaming accuracy for every environment context. We posit that scenario difficulty influences the initial (offline) accuracy difference, while obstacle displacement in the scene affects the subsequent accuracy degradation. Our method, Octopus, uses these scenario properties to select configurations that maximize streaming accuracy at test time. Our method improves tracking performance (S-MOTA) by 7.4% over the conventional static approach. Further, performance improvement using our method comes in addition to, and not instead of, advances in offline accuracy.
PDF Abstract
 Argoverse
Argoverse
