CVaR-based Flight Energy Risk Assessment for Multirotor UAVs using a Deep Energy Model
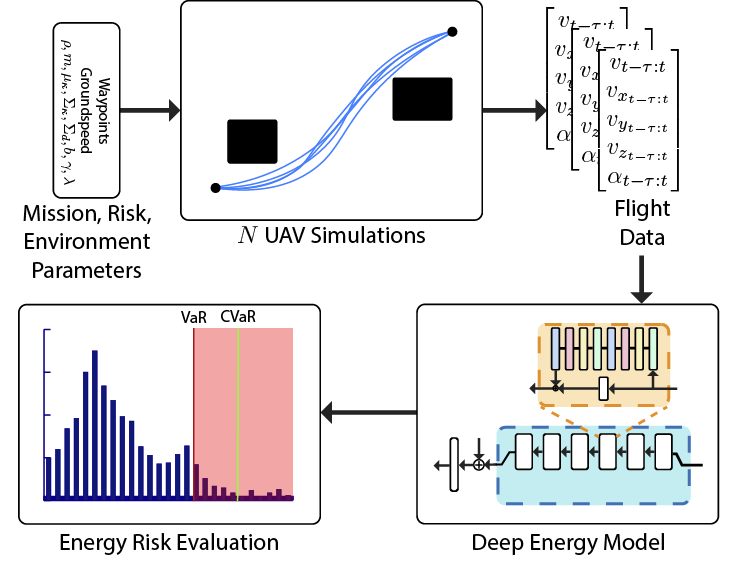
Energy management is a critical aspect of risk assessment for Uncrewed Aerial Vehicle (UAV) flights, as a depleted battery during a flight brings almost guaranteed vehicle damage and a high risk of human injuries or property damage. Predicting the amount of energy a flight will consume is challenging as routing, weather, obstacles, and other factors affect the overall consumption. We develop a deep energy model for a UAV that uses Temporal Convolutional Networks to capture the time varying features while incorporating static contextual information. Our energy model is trained on a real world dataset and does not require segregating flights into regimes. We illustrate an improvement in power predictions by $29\%$ on test flights when compared to a state-of-the-art analytical method. Using the energy model, we can predict the energy usage for a given trajectory and evaluate the risk of running out of battery during flight. We propose using Conditional Value-at-Risk (CVaR) as a metric for quantifying this risk. We show that CVaR captures the risk associated with worst-case energy consumption on a nominal path by transforming the output distribution of Monte Carlo forward simulations into a risk space. Computing the CVaR on the risk-space distribution provides a metric that can evaluate the overall risk of a flight before take-off. Our energy model and risk evaluation method can improve flight safety and evaluate the coverage area from a proposed takeoff location. The video and codebase are available at https://youtu.be/PHXGigqilOA and https://git.io/cvar-risk .
PDF Abstract

 Data Collected with Package Delivery Quadcopter Drone
Data Collected with Package Delivery Quadcopter Drone

