DASGIL: Domain Adaptation for Semantic and Geometric-aware Image-based Localization
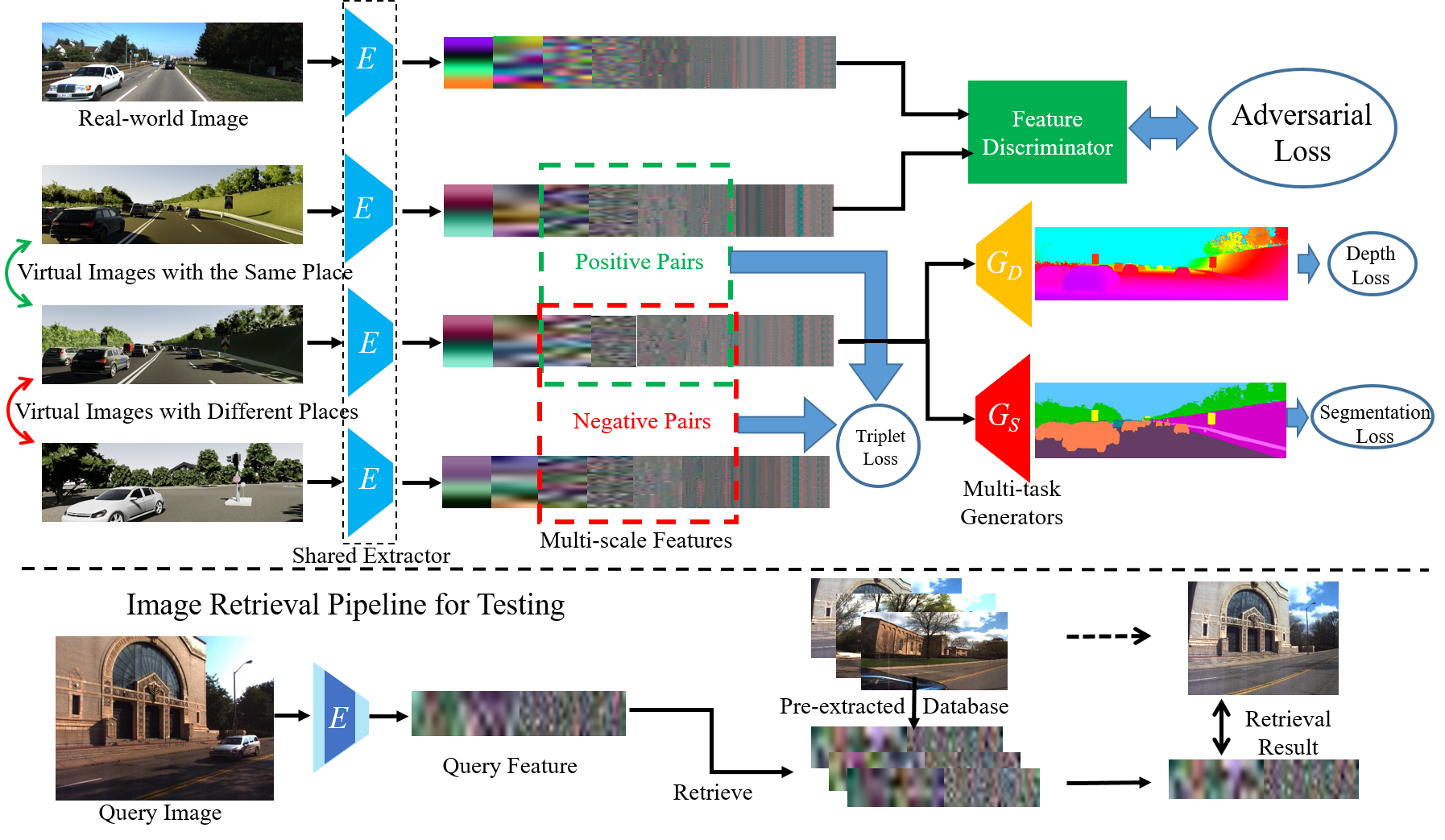
Long-Term visual localization under changing environments is a challenging problem in autonomous driving and mobile robotics due to season, illumination variance, etc. Image retrieval for localization is an efficient and effective solution to the problem. In this paper, we propose a novel multi-task architecture to fuse the geometric and semantic information into the multi-scale latent embedding representation for visual place recognition. To use the high-quality ground truths without any human effort, the effective multi-scale feature discriminator is proposed for adversarial training to achieve the domain adaptation from synthetic virtual KITTI dataset to real-world KITTI dataset. The proposed approach is validated on the Extended CMU-Seasons dataset and Oxford RobotCar dataset through a series of crucial comparison experiments, where our performance outperforms state-of-the-art baselines for retrieval-based localization and large-scale place recognition under the challenging environment.
PDF Abstract





 Virtual KITTI
Virtual KITTI
 Virtual KITTI 2
Virtual KITTI 2
