Deep Global Registration
We present Deep Global Registration, a differentiable framework for pairwise registration of real-world 3D scans. Deep global registration is based on three modules: a 6-dimensional convolutional network for correspondence confidence prediction, a differentiable Weighted Procrustes algorithm for closed-form pose estimation, and a robust gradient-based SE(3) optimizer for pose refinement. Experiments demonstrate that our approach outperforms state-of-the-art methods, both learning-based and classical, on real-world data.
PDF Abstract CVPR 2020 PDF CVPR 2020 Abstract


 KITTI
KITTI
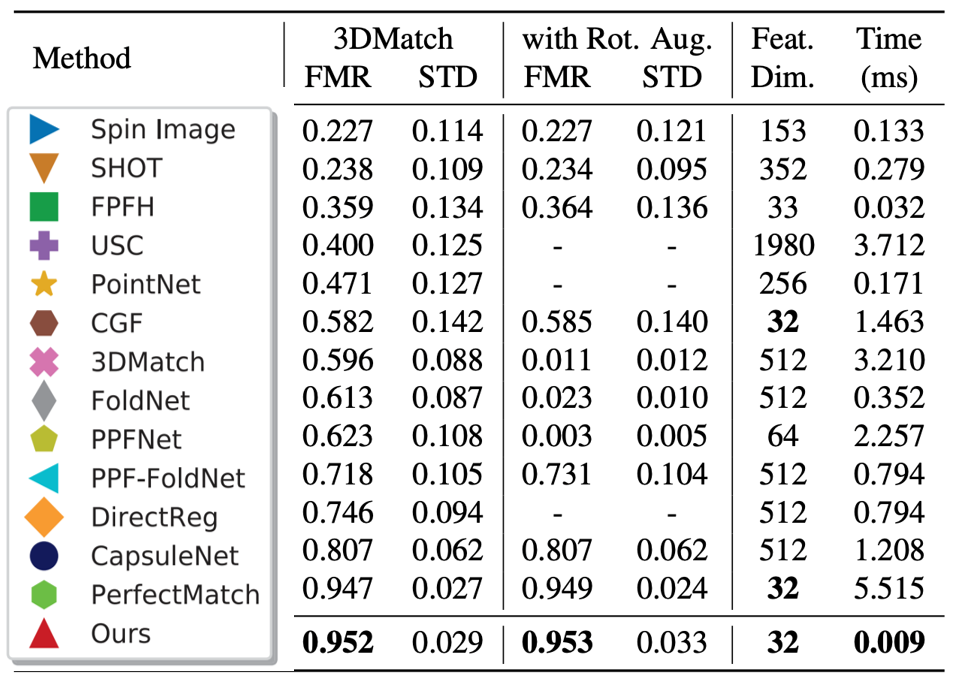
 3DMatch
3DMatch

