DexMV: Imitation Learning for Dexterous Manipulation from Human Videos
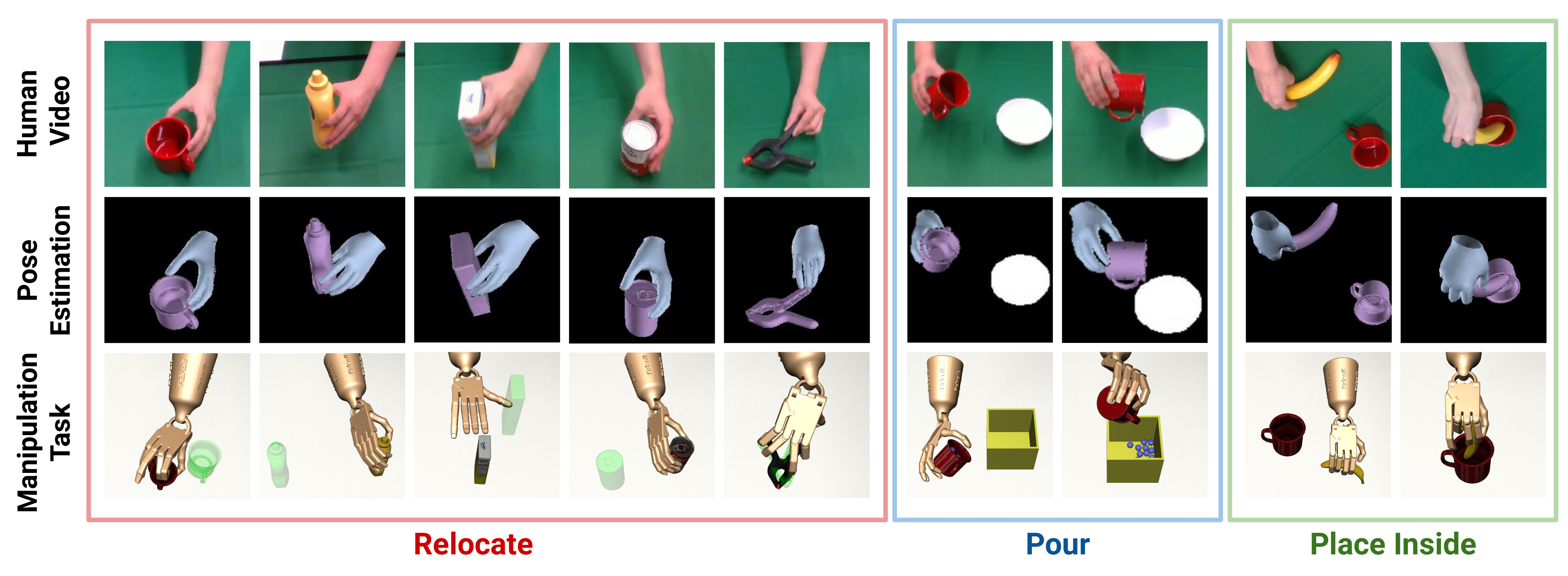
While significant progress has been made on understanding hand-object interactions in computer vision, it is still very challenging for robots to perform complex dexterous manipulation. In this paper, we propose a new platform and pipeline DexMV (Dexterous Manipulation from Videos) for imitation learning. We design a platform with: (i) a simulation system for complex dexterous manipulation tasks with a multi-finger robot hand and (ii) a computer vision system to record large-scale demonstrations of a human hand conducting the same tasks. In our novel pipeline, we extract 3D hand and object poses from videos, and propose a novel demonstration translation method to convert human motion to robot demonstrations. We then apply and benchmark multiple imitation learning algorithms with the demonstrations. We show that the demonstrations can indeed improve robot learning by a large margin and solve the complex tasks which reinforcement learning alone cannot solve. More details can be found in the project page: https://yzqin.github.io/dexmv
PDF Abstract
 ShapeNet
ShapeNet
 DexYCB
DexYCB
