Deep Iterative Surface Normal Estimation
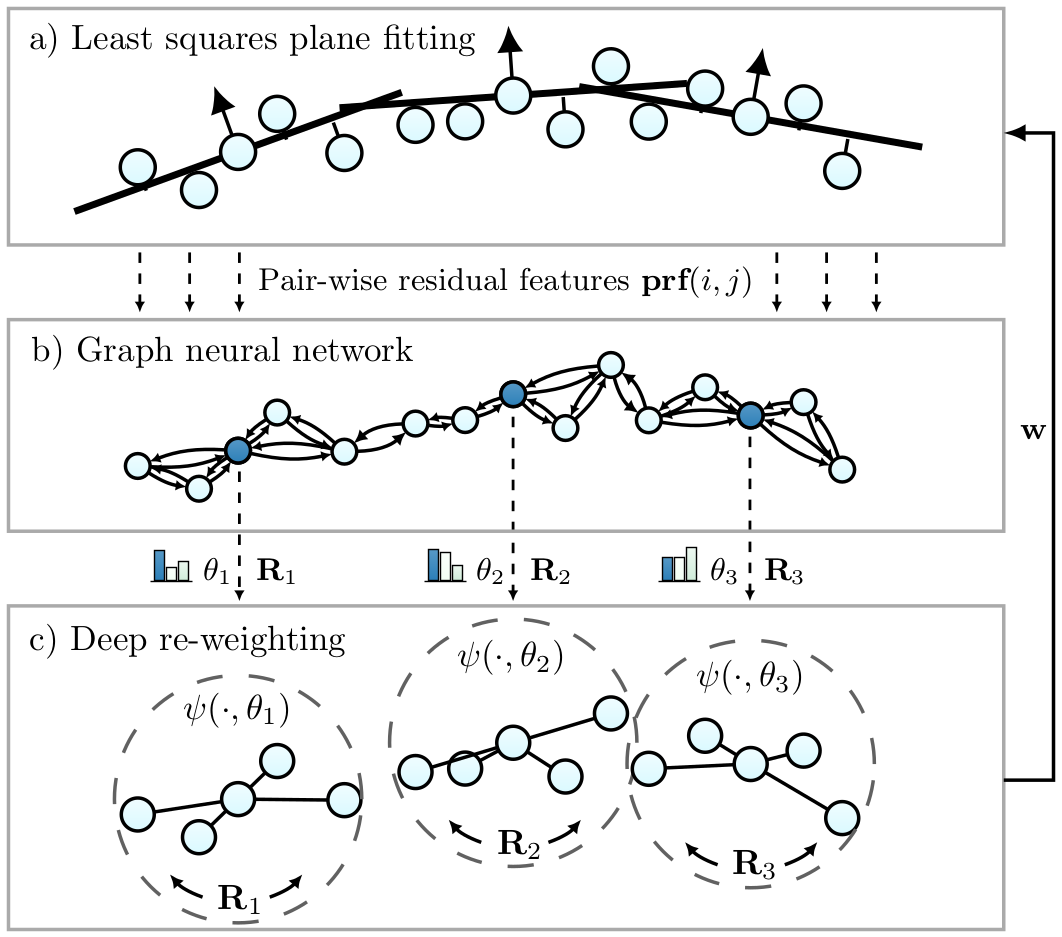
This paper presents an end-to-end differentiable algorithm for robust and detail-preserving surface normal estimation on unstructured point-clouds. We utilize graph neural networks to iteratively parameterize an adaptive anisotropic kernel that produces point weights for weighted least-squares plane fitting in local neighborhoods. The approach retains the interpretability and efficiency of traditional sequential plane fitting while benefiting from adaptation to data set statistics through deep learning. This results in a state-of-the-art surface normal estimator that is robust to noise, outliers and point density variation, preserves sharp features through anisotropic kernels and equivariance through a local quaternion-based spatial transformer. Contrary to previous deep learning methods, the proposed approach does not require any hand-crafted features or preprocessing. It improves on the state-of-the-art results while being more than two orders of magnitude faster and more parameter efficient.
PDF Abstract CVPR 2020 PDF CVPR 2020 Abstract


 NYUv2
NYUv2

