Do We Need Zero Training Loss After Achieving Zero Training Error?
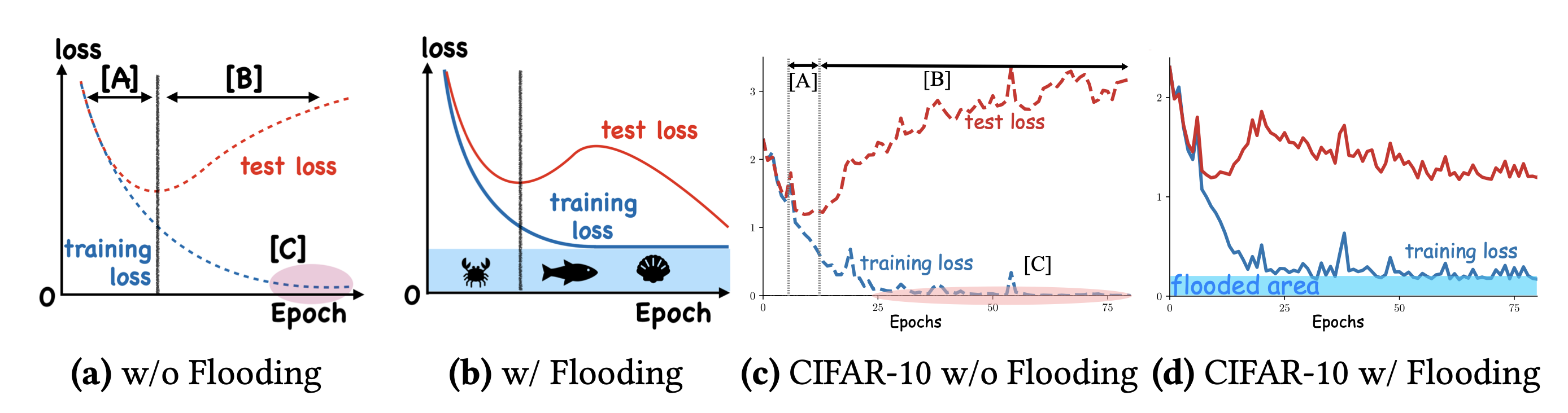
Overparameterized deep networks have the capacity to memorize training data with zero \emph{training error}. Even after memorization, the \emph{training loss} continues to approach zero, making the model overconfident and the test performance degraded. Since existing regularizers do not directly aim to avoid zero training loss, it is hard to tune their hyperparameters in order to maintain a fixed/preset level of training loss. We propose a direct solution called \emph{flooding} that intentionally prevents further reduction of the training loss when it reaches a reasonably small value, which we call the \emph{flood level}. Our approach makes the loss float around the flood level by doing mini-batched gradient descent as usual but gradient ascent if the training loss is below the flood level. This can be implemented with one line of code and is compatible with any stochastic optimizer and other regularizers. With flooding, the model will continue to "random walk" with the same non-zero training loss, and we expect it to drift into an area with a flat loss landscape that leads to better generalization. We experimentally show that flooding improves performance and, as a byproduct, induces a double descent curve of the test loss.
PDF Abstract ICML 2020 PDF

 MNIST
MNIST
 SVHN
SVHN
 Fashion-MNIST
Fashion-MNIST
 Kuzushiji-MNIST
Kuzushiji-MNIST
