Estimating and Exploiting the Aleatoric Uncertainty in Surface Normal Estimation
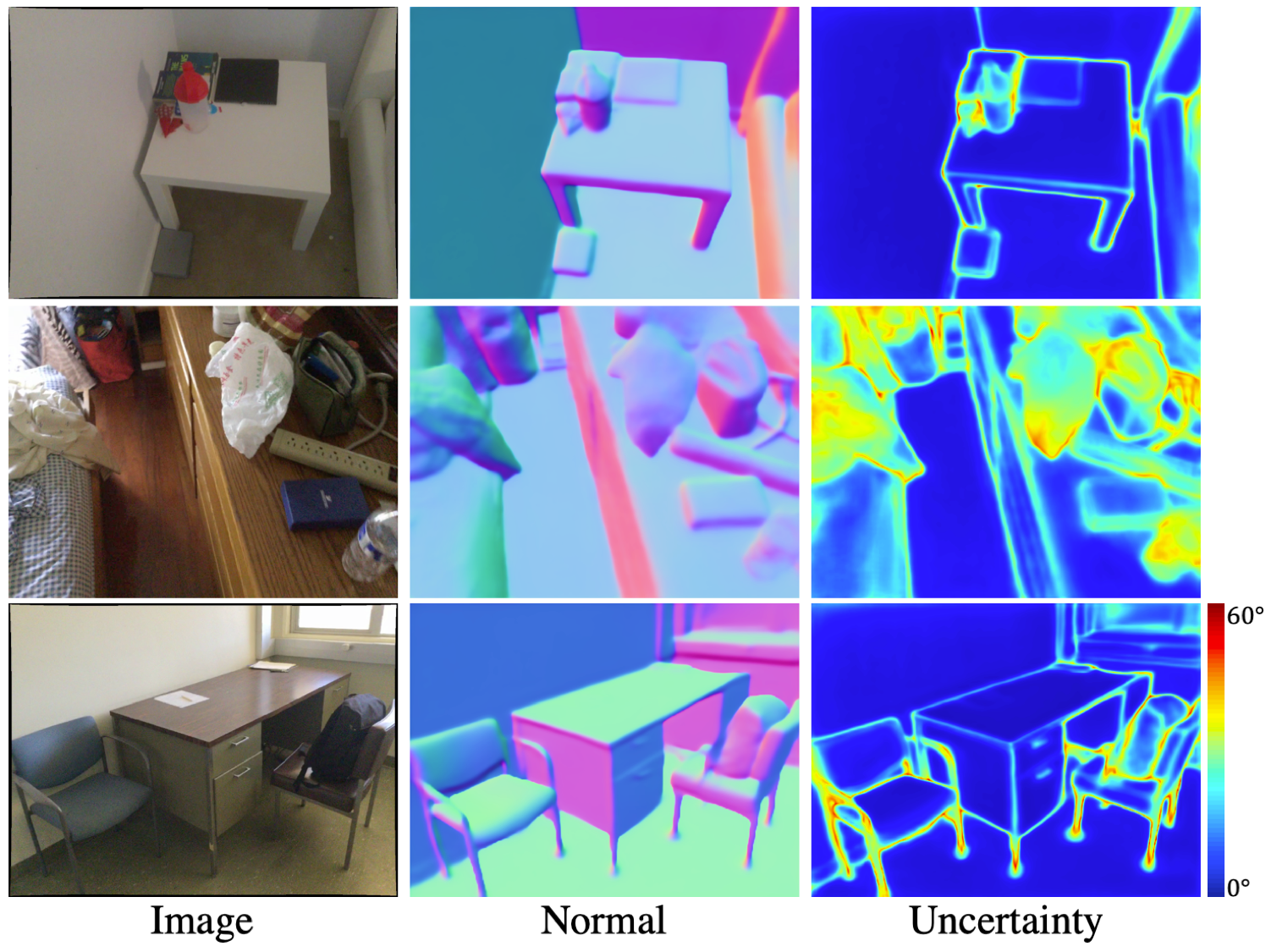
Surface normal estimation from a single image is an important task in 3D scene understanding. In this paper, we address two limitations shared by the existing methods: the inability to estimate the aleatoric uncertainty and lack of detail in the prediction. The proposed network estimates the per-pixel surface normal probability distribution. We introduce a new parameterization for the distribution, such that its negative log-likelihood is the angular loss with learned attenuation. The expected value of the angular error is then used as a measure of the aleatoric uncertainty. We also present a novel decoder framework where pixel-wise multi-layer perceptrons are trained on a subset of pixels sampled based on the estimated uncertainty. The proposed uncertainty-guided sampling prevents the bias in training towards large planar surfaces and improves the quality of prediction, especially near object boundaries and on small structures. Experimental results show that the proposed method outperforms the state-of-the-art in ScanNet and NYUv2, and that the estimated uncertainty correlates well with the prediction error. Code is available at https://github.com/baegwangbin/surface_normal_uncertainty.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract


 ScanNet
ScanNet
 NYUv2
NYUv2
 GRIT
GRIT

