Fast Scene Understanding for Autonomous Driving
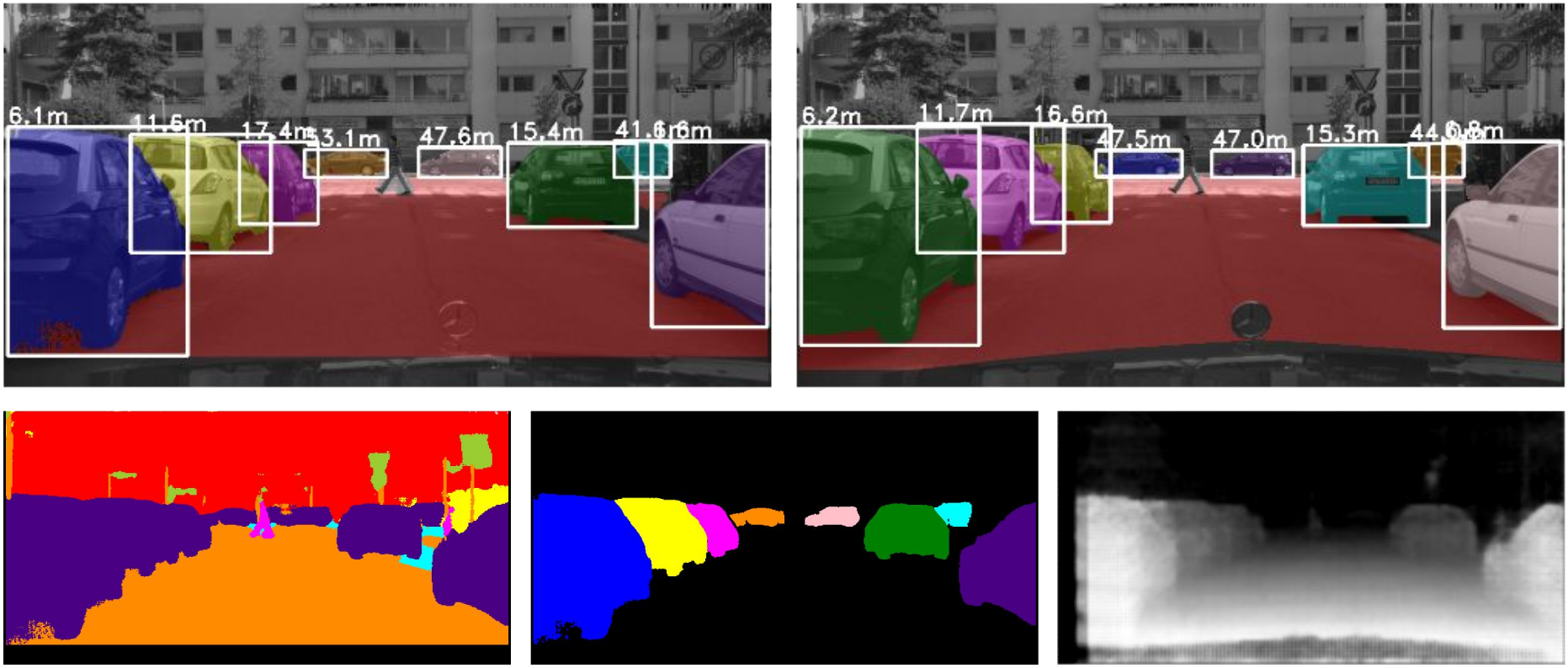
Most approaches for instance-aware semantic labeling traditionally focus on accuracy. Other aspects like runtime and memory footprint are arguably as important for real-time applications such as autonomous driving. Motivated by this observation and inspired by recent works that tackle multiple tasks with a single integrated architecture, in this paper we present a real-time efficient implementation based on ENet that solves three autonomous driving related tasks at once: semantic scene segmentation, instance segmentation and monocular depth estimation. Our approach builds upon a branched ENet architecture with a shared encoder but different decoder branches for each of the three tasks. The presented method can run at 21 fps at a resolution of 1024x512 on the Cityscapes dataset without sacrificing accuracy compared to running each task separately.
PDF Abstract







