Goal-GAN: Multimodal Trajectory Prediction Based on Goal Position Estimation
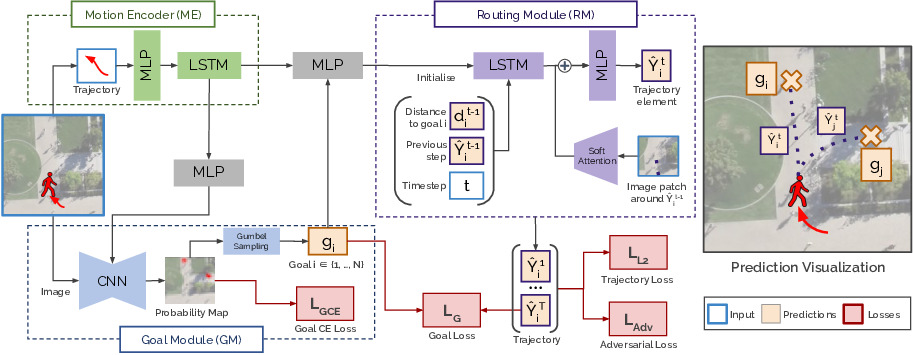
In this paper, we present Goal-GAN, an interpretable and end-to-end trainable model for human trajectory prediction. Inspired by human navigation, we model the task of trajectory prediction as an intuitive two-stage process: (i) goal estimation, which predicts the most likely target positions of the agent, followed by a (ii) routing module which estimates a set of plausible trajectories that route towards the estimated goal. We leverage information about the past trajectory and visual context of the scene to estimate a multi-modal probability distribution over the possible goal positions, which is used to sample a potential goal during the inference. The routing is governed by a recurrent neural network that reacts to physical constraints in the nearby surroundings and generates feasible paths that route towards the sampled goal. Our extensive experimental evaluation shows that our method establishes a new state-of-the-art on several benchmarks while being able to generate a realistic and diverse set of trajectories that conform to physical constraints.
PDF Abstract

 UCY
UCY
