Center and Scale Prediction: Anchor-free Approach for Pedestrian and Face Detection
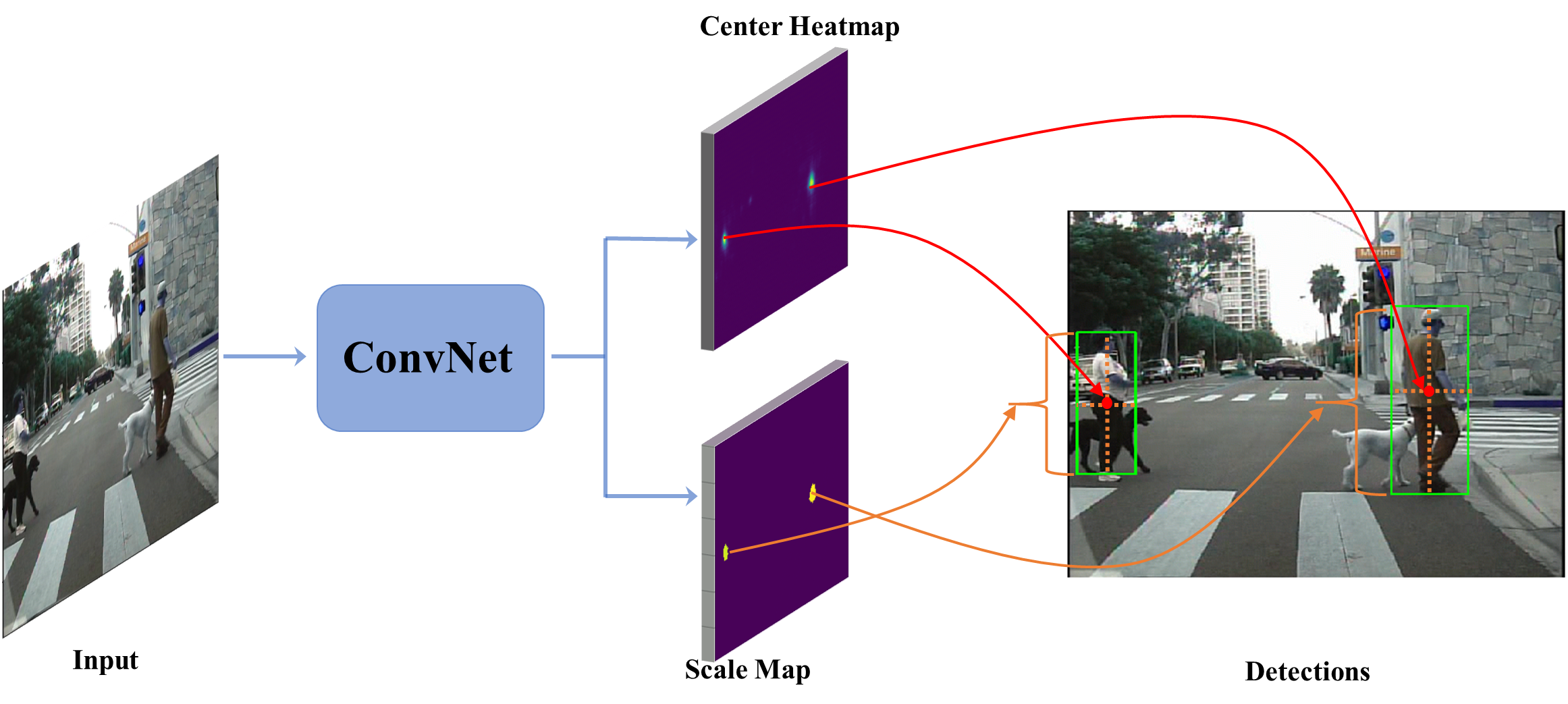
Object detection generally requires sliding-window classifiers in tradition or anchor box based predictions in modern deep learning approaches. However, either of these approaches requires tedious configurations in boxes. In this paper, we provide a new perspective where detecting objects is motivated as a high-level semantic feature detection task. Like edges, corners, blobs and other feature detectors, the proposed detector scans for feature points all over the image, for which the convolution is naturally suited. However, unlike these traditional low-level features, the proposed detector goes for a higher-level abstraction, that is, we are looking for central points where there are objects, and modern deep models are already capable of such a high-level semantic abstraction. Besides, like blob detection, we also predict the scales of the central points, which is also a straightforward convolution. Therefore, in this paper, pedestrian and face detection is simplified as a straightforward center and scale prediction task through convolutions. This way, the proposed method enjoys a box-free setting. Though structurally simple, it presents competitive accuracy on several challenging benchmarks, including pedestrian detection and face detection. Furthermore, a cross-dataset evaluation is performed, demonstrating a superior generalization ability of the proposed method. Code and models can be accessed at (https://github.com/liuwei16/CSP and https://github.com/hasanirtiza/Pedestron).
PDF AbstractCode






Datasets
 ImageNet
ImageNet
 ssd
ssd
 WIDER FACE
WIDER FACE
 FDDB
FDDB
 CrowdHuman
CrowdHuman
 CityPersons
CityPersons
Results from the Paper
 Ranked #8 on
Pedestrian Detection
on Caltech
(using extra training data)
Ranked #8 on
Pedestrian Detection
on Caltech
(using extra training data)
