High-resolution Iterative Feedback Network for Camouflaged Object Detection
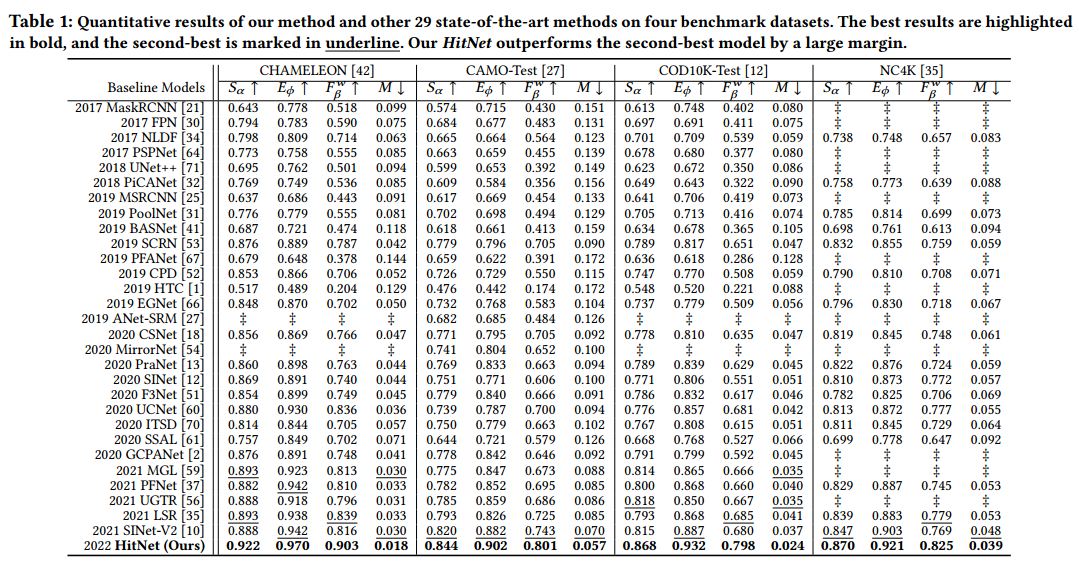
Spotting camouflaged objects that are visually assimilated into the background is tricky for both object detection algorithms and humans who are usually confused or cheated by the perfectly intrinsic similarities between the foreground objects and the background surroundings. To tackle this challenge, we aim to extract the high-resolution texture details to avoid the detail degradation that causes blurred vision in edges and boundaries. We introduce a novel HitNet to refine the low-resolution representations by high-resolution features in an iterative feedback manner, essentially a global loop-based connection among the multi-scale resolutions. In addition, an iterative feedback loss is proposed to impose more constraints on each feedback connection. Extensive experiments on four challenging datasets demonstrate that our \ourmodel~breaks the performance bottleneck and achieves significant improvements compared with 29 state-of-the-art methods. To address the data scarcity in camouflaged scenarios, we provide an application example by employing cross-domain learning to extract the features that can reflect the camouflaged object properties and embed the features into salient objects, thereby generating more camouflaged training samples from the diverse salient object datasets The code will be available at https://github.com/HUuxiaobin/HitNet.
PDF Abstract


 COD10K
COD10K
 CAMO
CAMO
 NC4K
NC4K
