Joint Parameter Discovery and Generative Modeling of Dynamic Systems
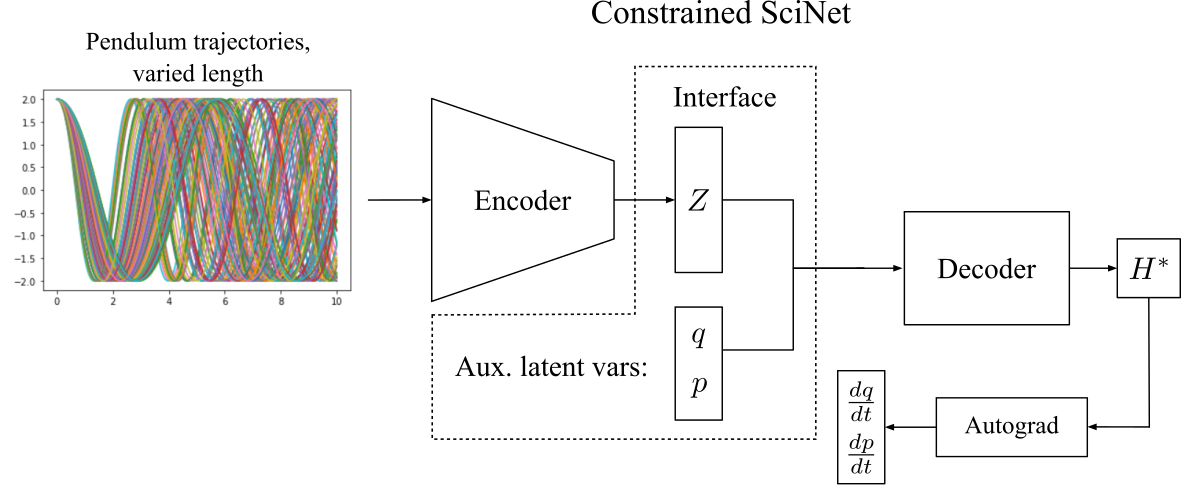
Given an unknown dynamic system such as a coupled harmonic oscillator with $n$ springs and point masses. We are often interested in gaining insights into its physical parameters, i.e. stiffnesses and masses, by observing trajectories of motion. How do we achieve this from video frames or time-series data and without the knowledge of the dynamics model? We present a neural framework for estimating physical parameters in a manner consistent with the underlying physics. The neural framework uses a deep latent variable model to disentangle the system physical parameters from canonical coordinate observations. It then returns a Hamiltonian parameterization that generalizes well with respect to the discovered physical parameters. We tested our framework with simple harmonic oscillators, $n=1$, and noisy observations and show that it discovers the underlying system parameters and generalizes well with respect to these discovered parameters. Our model also extrapolates the dynamics of the system beyond the training interval and outperforms a non-physically constrained baseline model. Our source code and datasets can be found at this URL: https://github.com/gbarber94/ConSciNet.
PDF Abstract Colab
Colab



