Keypoint-GraspNet: Keypoint-based 6-DoF Grasp Generation from the Monocular RGB-D input
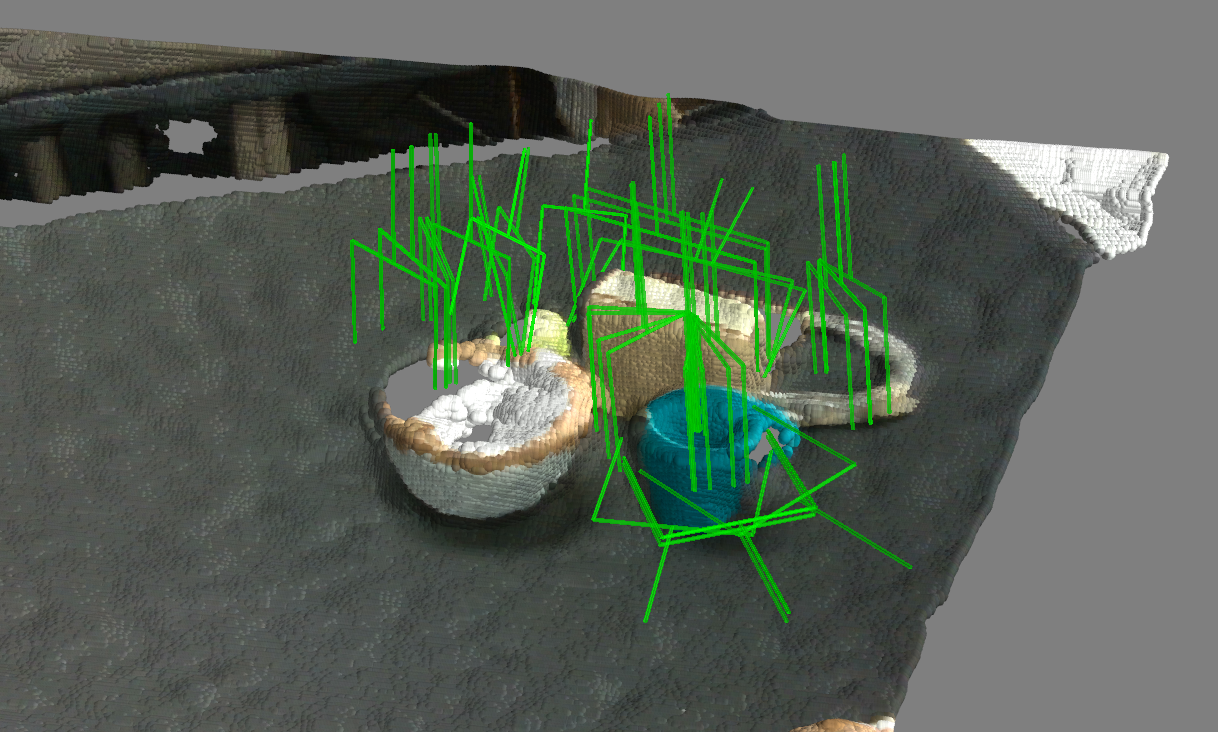
Great success has been achieved in the 6-DoF grasp learning from the point cloud input, yet the computational cost due to the point set orderlessness remains a concern. Alternatively, we explore the grasp generation from the RGB-D input in this paper. The proposed solution, Keypoint-GraspNet, detects the projection of the gripper keypoints in the image space and then recover the SE(3) poses with a PnP algorithm. A synthetic dataset based on the primitive shape and the grasp family is constructed to examine our idea. Metric-based evaluation reveals that our method outperforms the baselines in terms of the grasp proposal accuracy, diversity, and the time cost. Finally, robot experiments show high success rate, demonstrating the potential of the idea in the real-world applications.
PDF Abstract

