Learn to Match: Automatic Matching Network Design for Visual Tracking
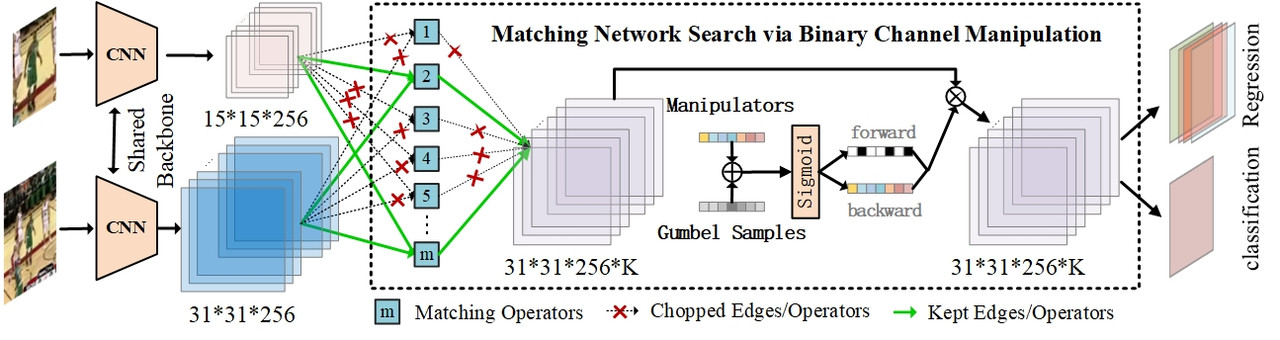
Siamese tracking has achieved groundbreaking performance in recent years, where the essence is the efficient matching operator cross-correlation and its variants. Besides the remarkable success, it is important to note that the heuristic matching network design relies heavily on expert experience. Moreover, we experimentally find that one sole matching operator is difficult to guarantee stable tracking in all challenging environments. Thus, in this work, we introduce six novel matching operators from the perspective of feature fusion instead of explicit similarity learning, namely Concatenation, Pointwise-Addition, Pairwise-Relation, FiLM, Simple-Transformer and Transductive-Guidance, to explore more feasibility on matching operator selection. The analyses reveal these operators' selective adaptability on different environment degradation types, which inspires us to combine them to explore complementary features. To this end, we propose binary channel manipulation (BCM) to search for the optimal combination of these operators. BCM determines to retrain or discard one operator by learning its contribution to other tracking steps. By inserting the learned matching networks to a strong baseline tracker Ocean, our model achieves favorable gains by $67.2 \rightarrow 71.4$, $52.6 \rightarrow 58.3$, $70.3 \rightarrow 76.0$ success on OTB100, LaSOT, and TrackingNet, respectively. Notably, Our tracker, dubbed AutoMatch, uses less than half of training data/time than the baseline tracker, and runs at 50 FPS using PyTorch. Code and model will be released at https://github.com/JudasDie/SOTS.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract

 OTB
OTB
 LaSOT
LaSOT
 GOT-10k
GOT-10k
 TrackingNet
TrackingNet
 TNL2K
TNL2K
