Learning 3D Dynamic Scene Representations for Robot Manipulation
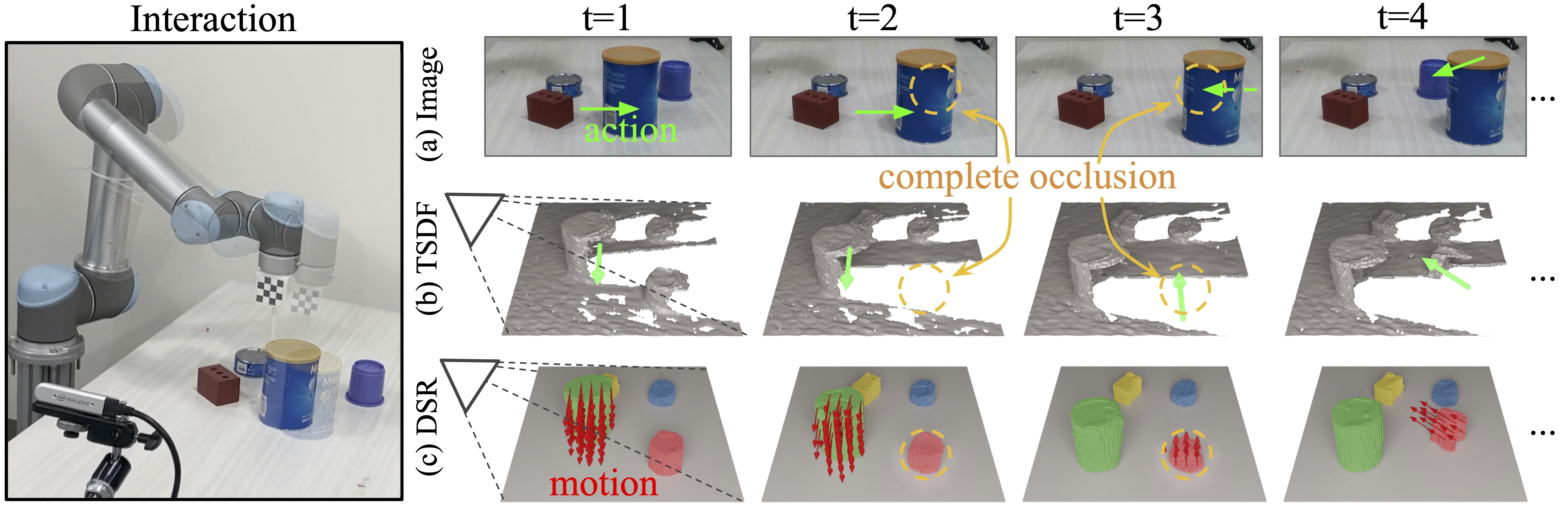
3D scene representation for robot manipulation should capture three key object properties: permanency -- objects that become occluded over time continue to exist; amodal completeness -- objects have 3D occupancy, even if only partial observations are available; spatiotemporal continuity -- the movement of each object is continuous over space and time. In this paper, we introduce 3D Dynamic Scene Representation (DSR), a 3D volumetric scene representation that simultaneously discovers, tracks, reconstructs objects, and predicts their dynamics while capturing all three properties. We further propose DSR-Net, which learns to aggregate visual observations over multiple interactions to gradually build and refine DSR. Our model achieves state-of-the-art performance in modeling 3D scene dynamics with DSR on both simulated and real data. Combined with model predictive control, DSR-Net enables accurate planning in downstream robotic manipulation tasks such as planar pushing. Video is available at https://youtu.be/GQjYG3nQJ80.
PDF Abstract

