Learning Efficient Single-stage Pedestrian Detectors by Asymptotic Localization Fitting
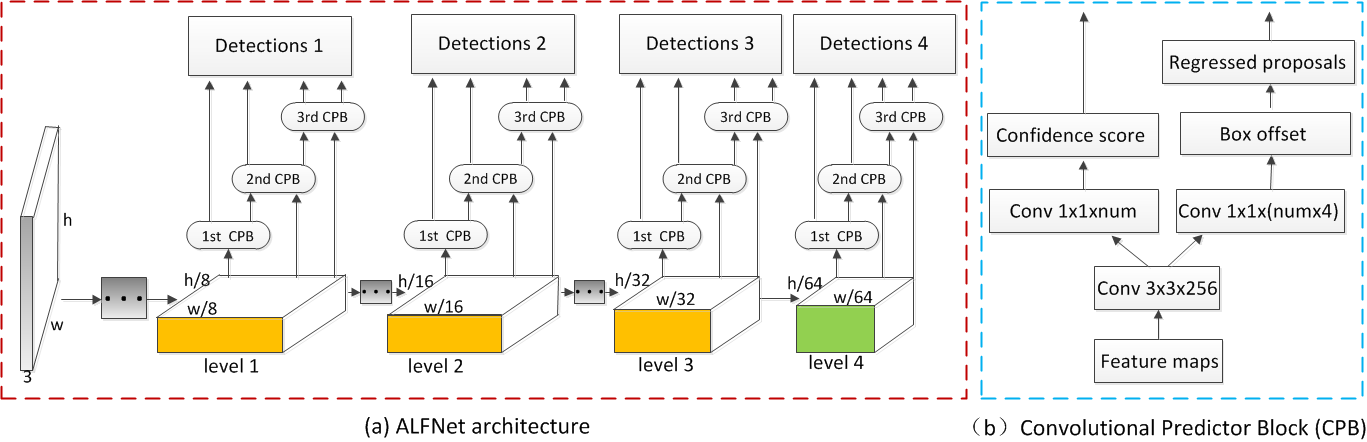
Though Faster R-CNN based two-stage detectors have witnessed significant boost in pedestrian detection accuracy, it is still slow for practical applications. One solution is to simplify this working flow as a single-stage detector. However, current single-stage detectors (e.g. SSD) have not presented competitive accuracy on common pedestrian detection benchmarks. This paper is towards a successful pedestrian detector enjoying the speed of SSD while maintaining the accuracy of Faster R-CNN. Specifically, a structurally simple but effective module called emph{Asymptotic Localization Fitting} (ALF) is proposed, which stacks a series of predictors to directly evolve the default anchor boxes of SSD step by step into improving detection results. As a result, during training the latter predictors enjoy more and better-quality positive samples, meanwhile harder negatives could be mined with increasing IoU thresholds. On top of this, an efficient single-stage pedestrian detection architecture (denoted as ALFNet) is designed, achieving state-of-the-art performance on CityPersons and Caltech, two of the largest pedestrian detection benchmarks, and hence resulting in an attractive pedestrian detector in both accuracy and speed. Code is available at href{https://github.com/VideoObjectSearch/ALFNet}{https://github.com/VideoObjectSearch/ALFNet}.
PDF Abstract
Tasks

Datasets
 ssd
ssd
 CityPersons
CityPersons
Results from the Paper
 Ranked #11 on
Pedestrian Detection
on Caltech
(using extra training data)
Ranked #11 on
Pedestrian Detection
on Caltech
(using extra training data)
