Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
We propose a novel, conceptually simple and general framework for instance segmentation on 3D point clouds. Our method, called 3D-BoNet, follows the simple design philosophy of per-point multilayer perceptrons (MLPs). The framework directly regresses 3D bounding boxes for all instances in a point cloud, while simultaneously predicting a point-level mask for each instance. It consists of a backbone network followed by two parallel network branches for 1) bounding box regression and 2) point mask prediction. 3D-BoNet is single-stage, anchor-free and end-to-end trainable. Moreover, it is remarkably computationally efficient as, unlike existing approaches, it does not require any post-processing steps such as non-maximum suppression, feature sampling, clustering or voting. Extensive experiments show that our approach surpasses existing work on both ScanNet and S3DIS datasets while being approximately 10x more computationally efficient. Comprehensive ablation studies demonstrate the effectiveness of our design.
PDF Abstract NeurIPS 2019 PDF NeurIPS 2019 AbstractCode






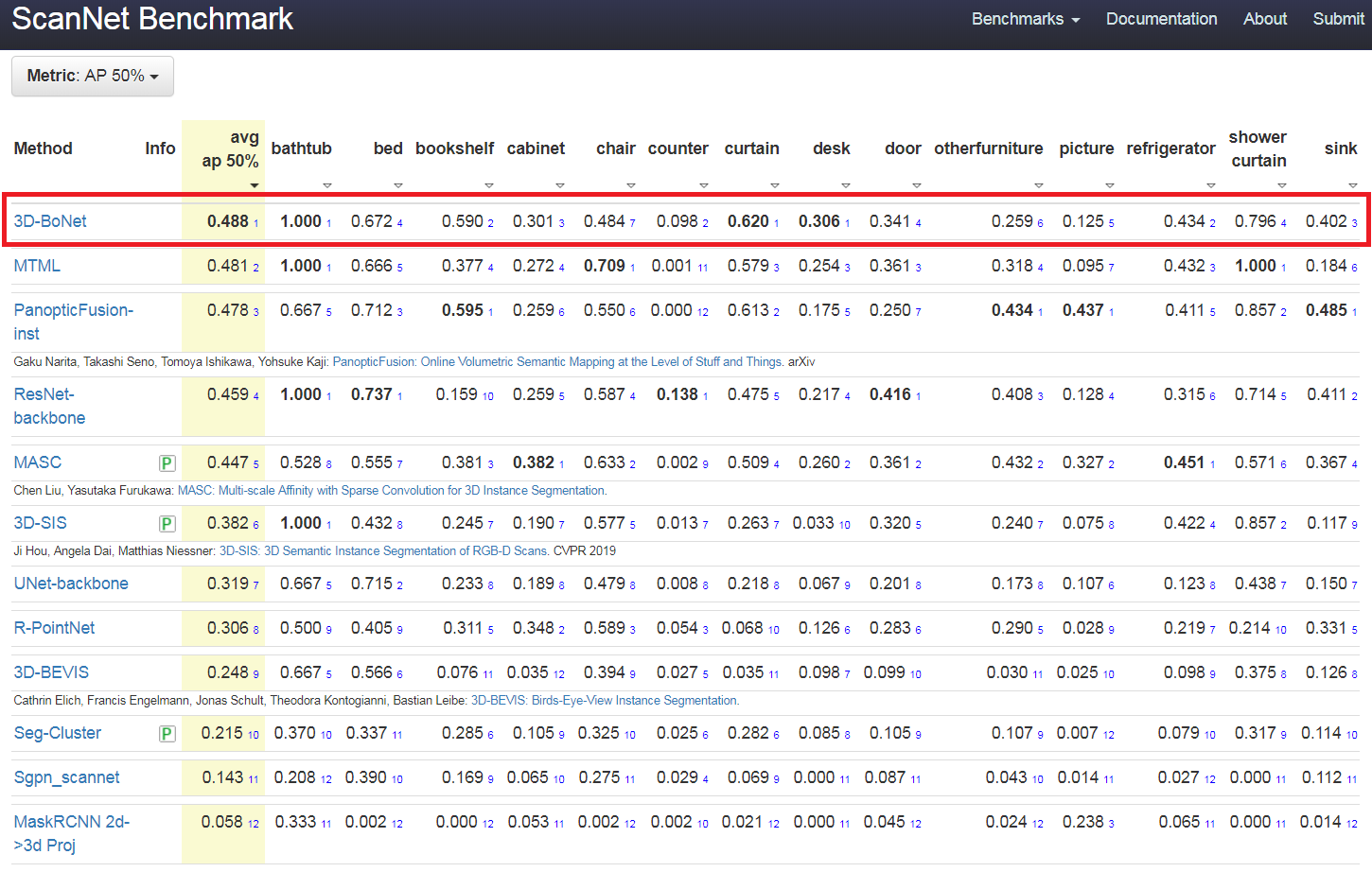
 ScanNet
ScanNet
 S3DIS
S3DIS
 PartNet
PartNet
Results from the Paper
 Ranked #13 on
3D Instance Segmentation
on S3DIS
(mPrec metric)
Ranked #13 on
3D Instance Segmentation
on S3DIS
(mPrec metric)
