Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning
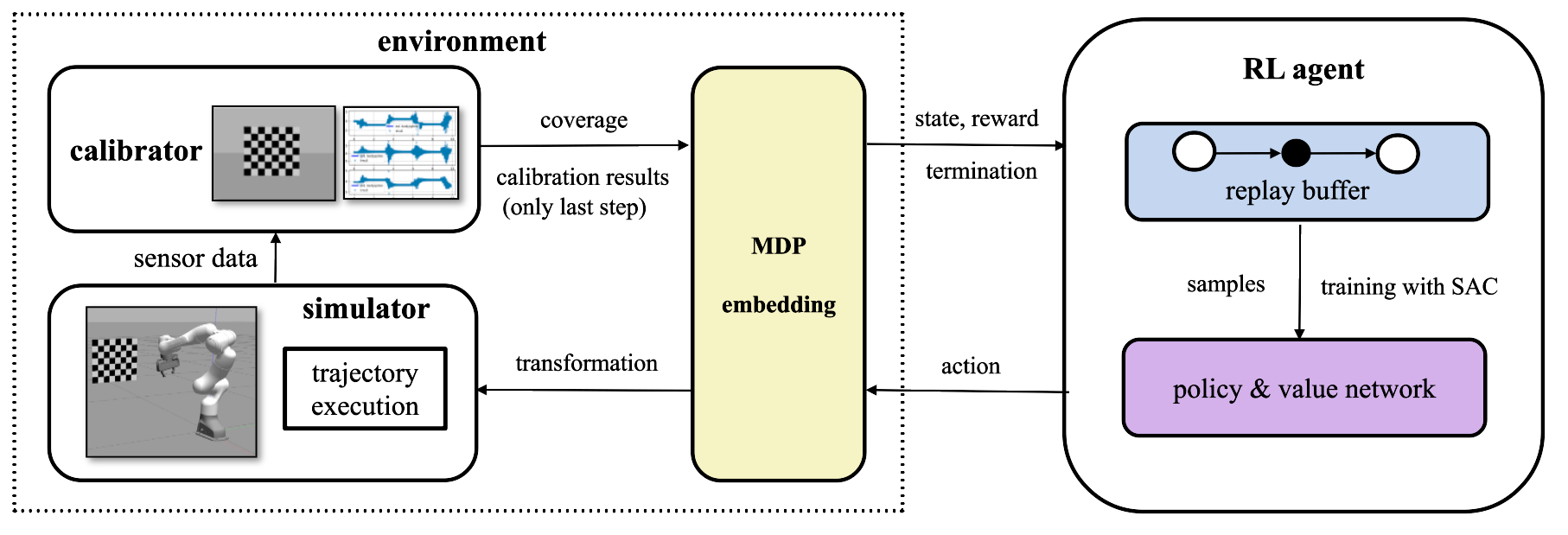
Visual-inertial systems rely on precise calibrations of both camera intrinsics and inter-sensor extrinsics, which typically require manually performing complex motions in front of a calibration target. In this work we present a novel approach to obtain favorable trajectories for visual-inertial system calibration, using model-based deep reinforcement learning. Our key contribution is to model the calibration process as a Markov decision process and then use model-based deep reinforcement learning with particle swarm optimization to establish a sequence of calibration trajectories to be performed by a robot arm. Our experiments show that while maintaining similar or shorter path lengths, the trajectories generated by our learned policy result in lower calibration errors compared to random or handcrafted trajectories.
PDF Abstract

