LiDAR-based 4D Panoptic Segmentation via Dynamic Shifting Network
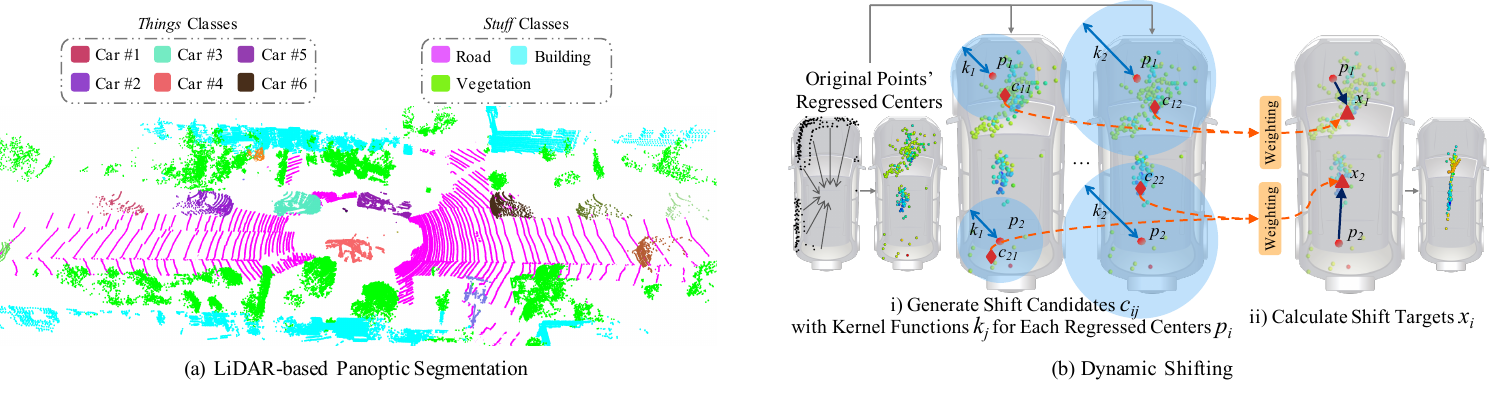
With the rapid advances of autonomous driving, it becomes critical to equip its sensing system with more holistic 3D perception. However, existing works focus on parsing either the objects (e.g. cars and pedestrians) or scenes (e.g. trees and buildings) from the LiDAR sensor. In this work, we address the task of LiDAR-based panoptic segmentation, which aims to parse both objects and scenes in a unified manner. As one of the first endeavors towards this new challenging task, we propose the Dynamic Shifting Network (DS-Net), which serves as an effective panoptic segmentation framework in the point cloud realm. In particular, DS-Net has three appealing properties: 1) Strong backbone design. DS-Net adopts the cylinder convolution that is specifically designed for LiDAR point clouds. 2) Dynamic Shifting for complex point distributions. We observe that commonly-used clustering algorithms are incapable of handling complex autonomous driving scenes with non-uniform point cloud distributions and varying instance sizes. Thus, we present an efficient learnable clustering module, dynamic shifting, which adapts kernel functions on the fly for different instances. 3) Extension to 4D prediction. Furthermore, we extend DS-Net to 4D panoptic LiDAR segmentation by the temporally unified instance clustering on aligned LiDAR frames. To comprehensively evaluate the performance of LiDAR-based panoptic segmentation, we construct and curate benchmarks from two large-scale autonomous driving LiDAR datasets, SemanticKITTI and nuScenes. Extensive experiments demonstrate that our proposed DS-Net achieves superior accuracies over current state-of-the-art methods in both tasks. Notably, in the single frame version of the task, we outperform the SOTA method by 1.8% in terms of the PQ metric. In the 4D version of the task, we surpass 2nd place by 5.4% in terms of the LSTQ metric.
PDF Abstract





 nuScenes
nuScenes
 SemanticKITTI
SemanticKITTI
