M2DGR: A Multi-sensor and Multi-scenario SLAM Dataset for Ground Robots
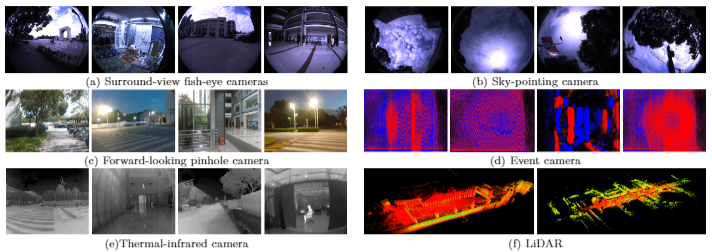
We introduce M2DGR: a novel large-scale dataset collected by a ground robot with a full sensor-suite including six fish-eye and one sky-pointing RGB cameras, an infrared camera, an event camera, a Visual-Inertial Sensor (VI-sensor), an inertial measurement unit (IMU), a LiDAR, a consumer-grade Global Navigation Satellite System (GNSS) receiver and a GNSS-IMU navigation system with real-time kinematic (RTK) signals. All those sensors were well-calibrated and synchronized, and their data were recorded simultaneously. The ground truth trajectories were obtained by the motion capture device, a laser 3D tracker, and an RTK receiver. The dataset comprises 36 sequences (about 1TB) captured in diverse scenarios including both indoor and outdoor environments. We evaluate state-of-the-art SLAM algorithms on M2DGR. Results show that existing solutions perform poorly in some scenarios. For the benefit of the research community, we make the dataset and tools public. The webpage of our project is https://github.com/SJTU-ViSYS/M2DGR.
PDF Abstract NCLT
NCLT
 UrbanLoco
UrbanLoco
