Mapping in a cycle: Sinkhorn regularized unsupervised learning for point cloud shapes
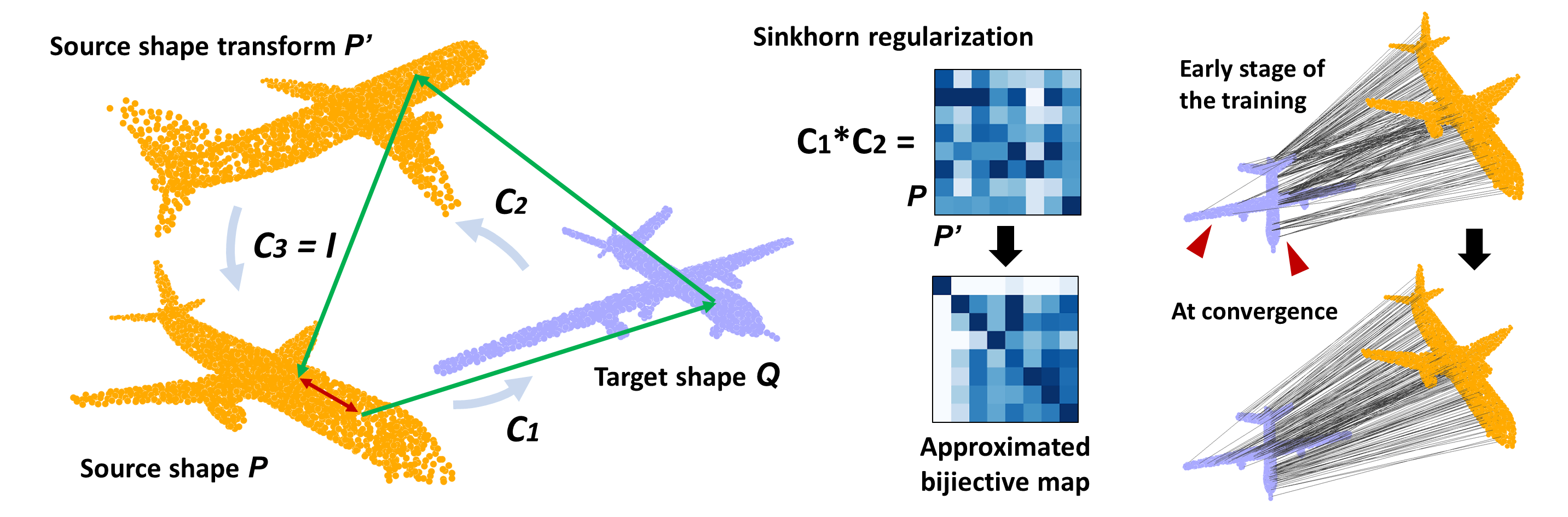
We propose an unsupervised learning framework with the pretext task of finding dense correspondences between point cloud shapes from the same category based on the cycle-consistency formulation. In order to learn discriminative pointwise features from point cloud data, we incorporate in the formulation a regularization term based on Sinkhorn normalization to enhance the learned pointwise mappings to be as bijective as possible. Besides, a random rigid transform of the source shape is introduced to form a triplet cycle to improve the model's robustness against perturbations. Comprehensive experiments demonstrate that the learned pointwise features through our framework benefits various point cloud analysis tasks, e.g. partial shape registration and keypoint transfer. We also show that the learned pointwise features can be leveraged by supervised methods to improve the part segmentation performance with either the full training dataset or just a small portion of it.
PDF Abstract ECCV 2020 PDF ECCV 2020 Abstract
 ModelNet
ModelNet
 ShapeNetCore
ShapeNetCore
