Morphable Detector for Object Detection on Demand
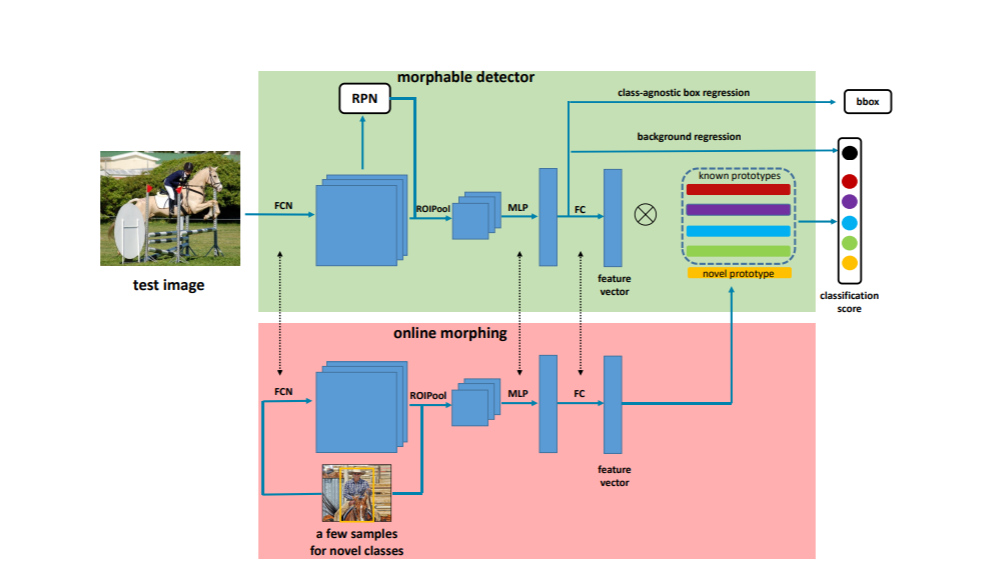
Many emerging applications of intelligent robots need to explore and understand new environments, where it is desirable to detect objects of novel classes on the fly with minimum online efforts. This is an object detection on demand (ODOD) task. It is challenging, because it is impossible to annotate a large number of data on the fly, and the embedded systems are usually unable to perform back-propagation which is essential for training. Most existing few-shot detection methods are confronted here as they need extra training. We propose a novel morphable detector (MD), that simply "morphs" some of its changeable parameters online estimated from the few samples, so as to detect novel classes without any extra training. The MD has two sets of parameters, one for the feature embedding and the other for class representation (called "prototypes"). Each class is associated with a hidden prototype to be learned by integrating the visual and semantic embeddings. The learning of the MD is based on the alternate learning of the feature embedding and the prototypes in an EM-like approach which allows the recovery of an unknown prototype from a few samples of a novel class. Once an MD is learned, it is able to use a few samples of a novel class to directly compute its prototype to fulfill the online morphing process. We have shown the superiority of the MD in Pascal, COCO and FSOD datasets. The code is available https://github.com/Zhaoxiangyun/Morphable-Detector.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract


 ImageNet
ImageNet
 MS COCO
MS COCO
