Multi-View Depth Estimation by Fusing Single-View Depth Probability with Multi-View Geometry
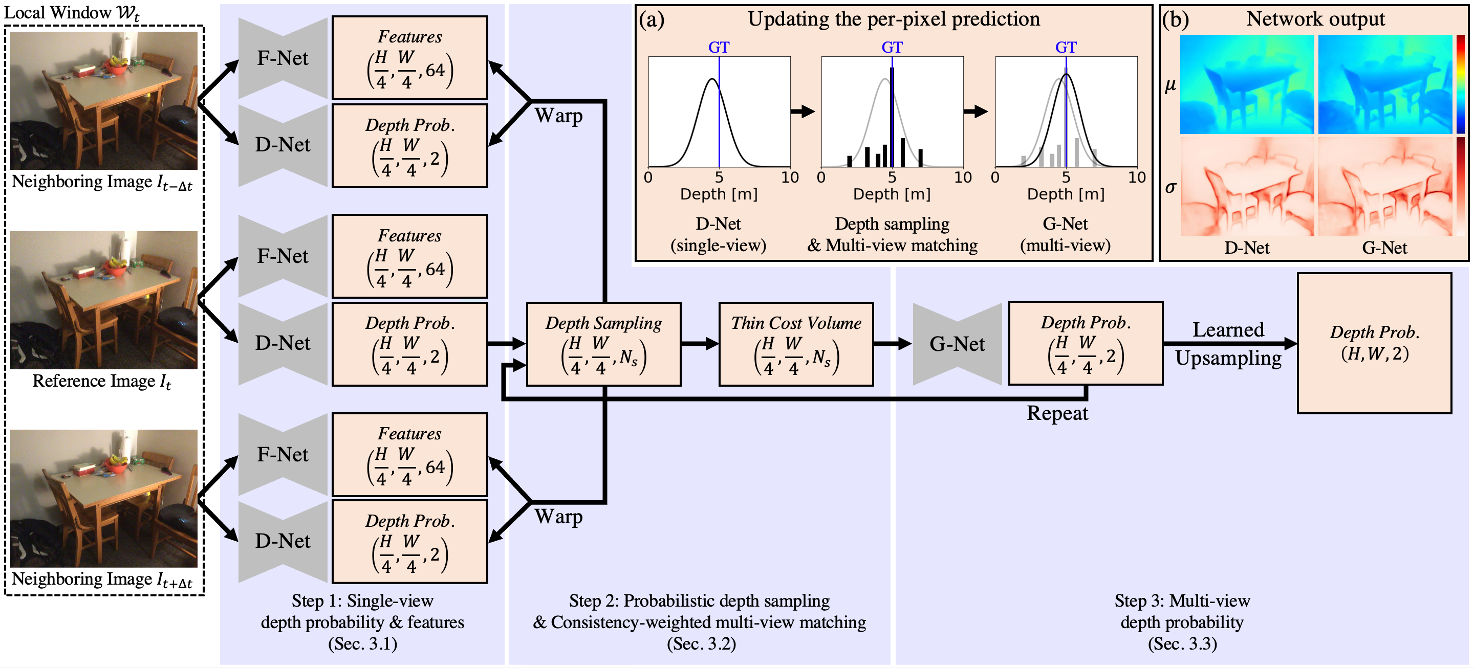
Multi-view depth estimation methods typically require the computation of a multi-view cost-volume, which leads to huge memory consumption and slow inference. Furthermore, multi-view matching can fail for texture-less surfaces, reflective surfaces and moving objects. For such failure modes, single-view depth estimation methods are often more reliable. To this end, we propose MaGNet, a novel framework for fusing single-view depth probability with multi-view geometry, to improve the accuracy, robustness and efficiency of multi-view depth estimation. For each frame, MaGNet estimates a single-view depth probability distribution, parameterized as a pixel-wise Gaussian. The distribution estimated for the reference frame is then used to sample per-pixel depth candidates. Such probabilistic sampling enables the network to achieve higher accuracy while evaluating fewer depth candidates. We also propose depth consistency weighting for the multi-view matching score, to ensure that the multi-view depth is consistent with the single-view predictions. The proposed method achieves state-of-the-art performance on ScanNet, 7-Scenes and KITTI. Qualitative evaluation demonstrates that our method is more robust against challenging artifacts such as texture-less/reflective surfaces and moving objects. Our code and model weights are available at https://github.com/baegwangbin/MaGNet.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract

 ScanNet
ScanNet
