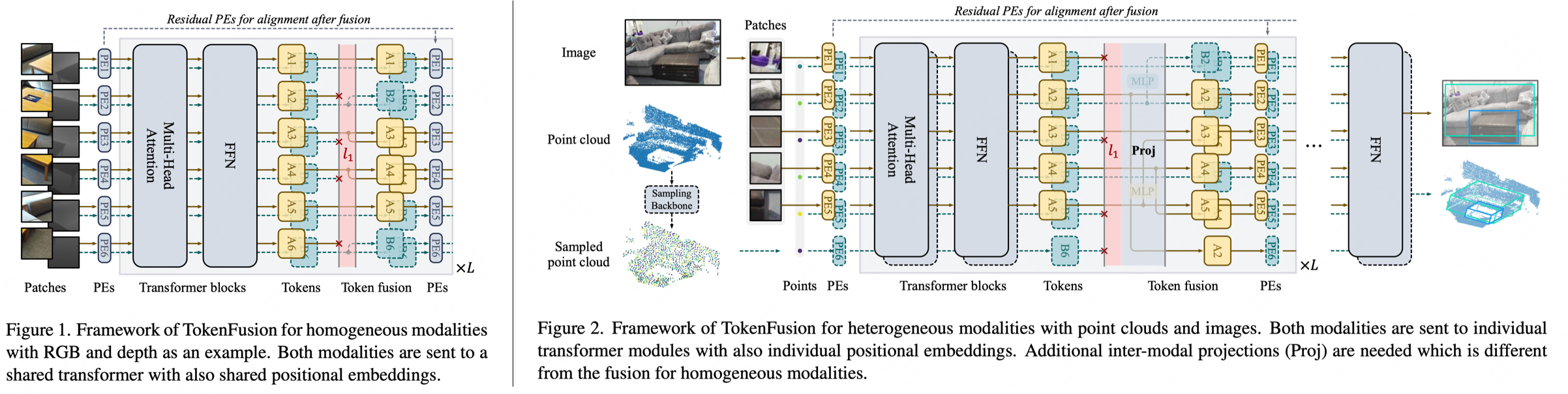
Multimodal Token Fusion for Vision Transformers
Many adaptations of transformers have emerged to address the single-modal vision tasks, where self-attention modules are stacked to handle input sources like images. Intuitively, feeding multiple modalities of data to vision transformers could improve the performance, yet the inner-modal attentive weights may also be diluted, which could thus undermine the final performance. In this paper, we propose a multimodal token fusion method (TokenFusion), tailored for transformer-based vision tasks. To effectively fuse multiple modalities, TokenFusion dynamically detects uninformative tokens and substitutes these tokens with projected and aggregated inter-modal features. Residual positional alignment is also adopted to enable explicit utilization of the inter-modal alignments after fusion. The design of TokenFusion allows the transformer to learn correlations among multimodal features, while the single-modal transformer architecture remains largely intact. Extensive experiments are conducted on a variety of homogeneous and heterogeneous modalities and demonstrate that TokenFusion surpasses state-of-the-art methods in three typical vision tasks: multimodal image-to-image translation, RGB-depth semantic segmentation, and 3D object detection with point cloud and images. Our code is available at https://github.com/yikaiw/TokenFusion.
PDF Abstract journal 2022 PDFCode


 Spaces
Spaces





 ScanNet
ScanNet
 NYUv2
NYUv2
 SUN RGB-D
SUN RGB-D
 KITTI-360
KITTI-360
 Taskonomy
Taskonomy
 DELIVER
DELIVER
Results from the Paper
 Ranked #1 on
Semantic Segmentation
on SUN-RGBD
(using extra training data)
Ranked #1 on
Semantic Segmentation
on SUN-RGBD
(using extra training data)
