On the Transfer of Inductive Bias from Simulation to the Real World: a New Disentanglement Dataset
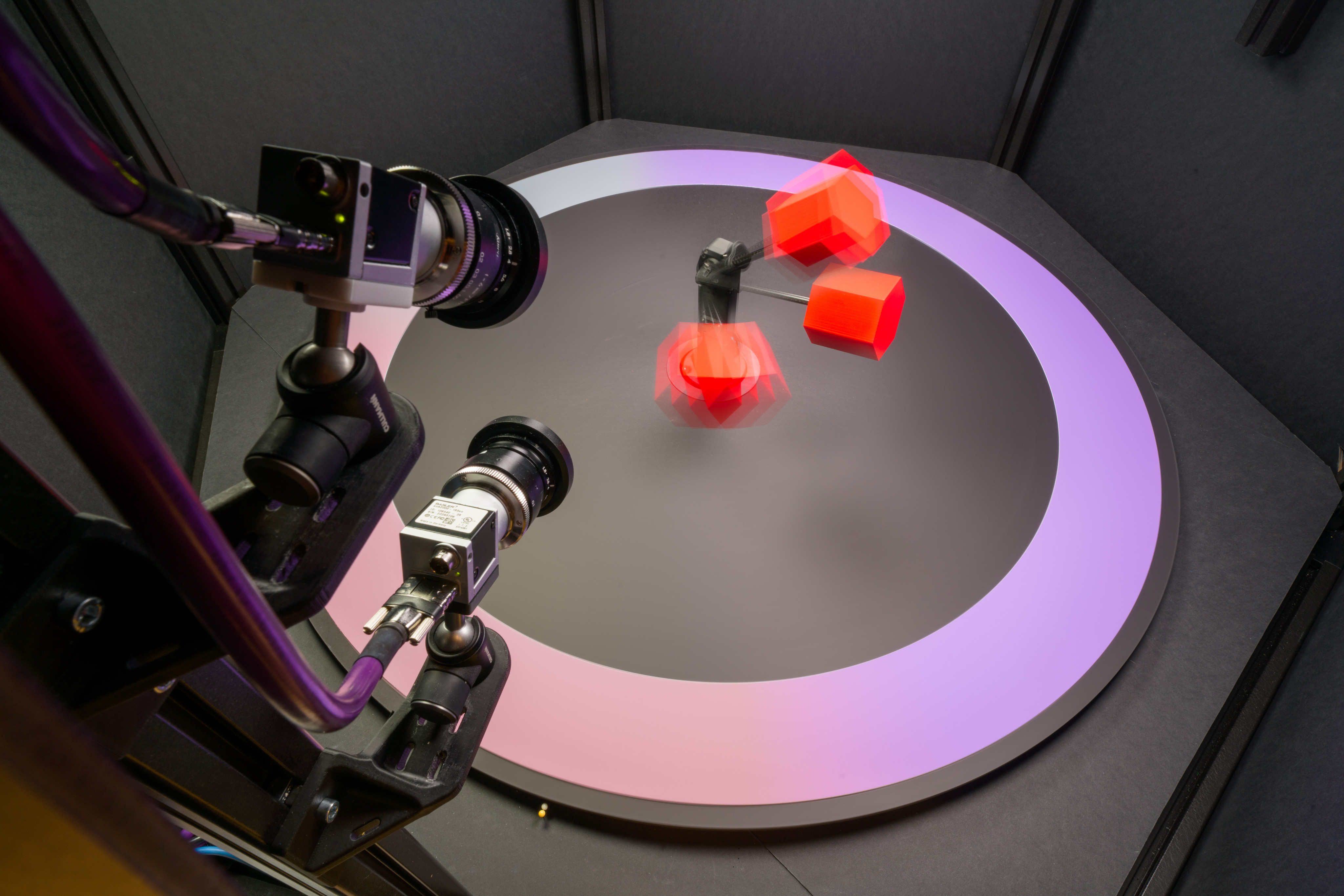
Learning meaningful and compact representations with disentangled semantic aspects is considered to be of key importance in representation learning. Since real-world data is notoriously costly to collect, many recent state-of-the-art disentanglement models have heavily relied on synthetic toy data-sets. In this paper, we propose a novel data-set which consists of over one million images of physical 3D objects with seven factors of variation, such as object color, shape, size and position. In order to be able to control all the factors of variation precisely, we built an experimental platform where the objects are being moved by a robotic arm. In addition, we provide two more datasets which consist of simulations of the experimental setup. These datasets provide for the first time the possibility to systematically investigate how well different disentanglement methods perform on real data in comparison to simulation, and how simulated data can be leveraged to build better representations of the real world. We provide a first experimental study of these questions and our results indicate that learned models transfer poorly, but that model and hyperparameter selection is an effective means of transferring information to the real world.
PDF Abstract NeurIPS 2019 PDF NeurIPS 2019 AbstractCode



Datasets
Introduced in the Paper:
 MPI3D Disentanglement
MPI3D Disentanglement
Used in the Paper:
 dSprites
dSprites
 smallNORB
smallNORB
 3D Shapes Dataset
3D Shapes Dataset
 3D Cars
3D Cars
